ロボットシステムによる全身アプリケーションの予期せぬ起動を防止する方法
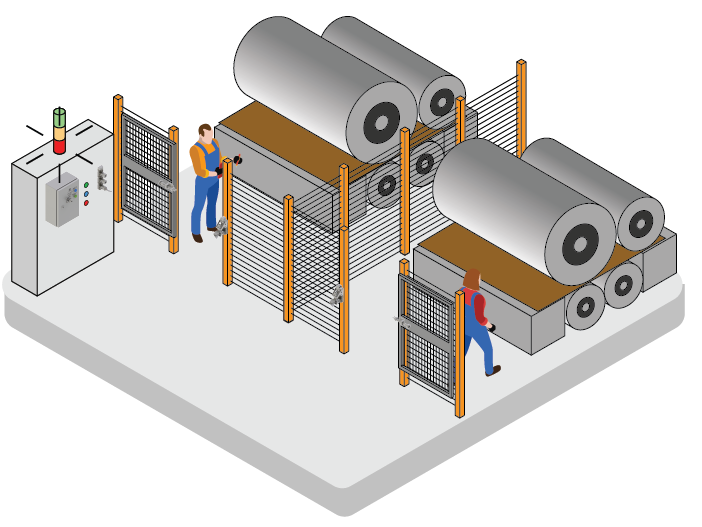
ホールボディアクセスとは、個人が完全に保護空間 の周囲に入ることができる状況のことです。ロボットシステムには大規模な保護システムが付随していることが多いため、ホールボディアクセスは考慮しなければならない事項のひとつです。
産業用ロボットの安全要件に関するISO規格(ISO 10218:2011)は、米国(RIA 15.06 - 2012)、カナダ(CSA Z434 - 2014)、オーストラリア(AS 4024.3301/2:2017) 、インド(IS 14530:2019)など多くの地域で採用されており、最も調和のとれた機械安全規格と言えるでしょう。
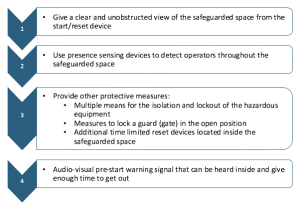
これは、ロボットの設計、製造、使用に携わる人にとって朗報であり、特に複数の国や地域間で要求事項が同一になるため、複数の国や地域にまたがる場合はなおさらです。ISO 10218-2:2011 は、オペレータが保護空間 内にいるときにロボットシステムが予期せず起動することを防ぐ方法について、非常に明確なガイダンスを提供しています。
ロボットシステムの予期せぬ起動を防止するためのガイダンス
ロボットシステムの予期せぬ起動を防止するためのガイダンス
緊急停止 予期せぬ起動を防ぐために他の手段がない場合のみ、オーディオビジュアルによる起動前の警告を使用することができます。また、保護空間 内部で誰かが信号によって警告された場合に備えて、簡単に識別でき、アクセス可能な十分なデバイスを使用することもできます。
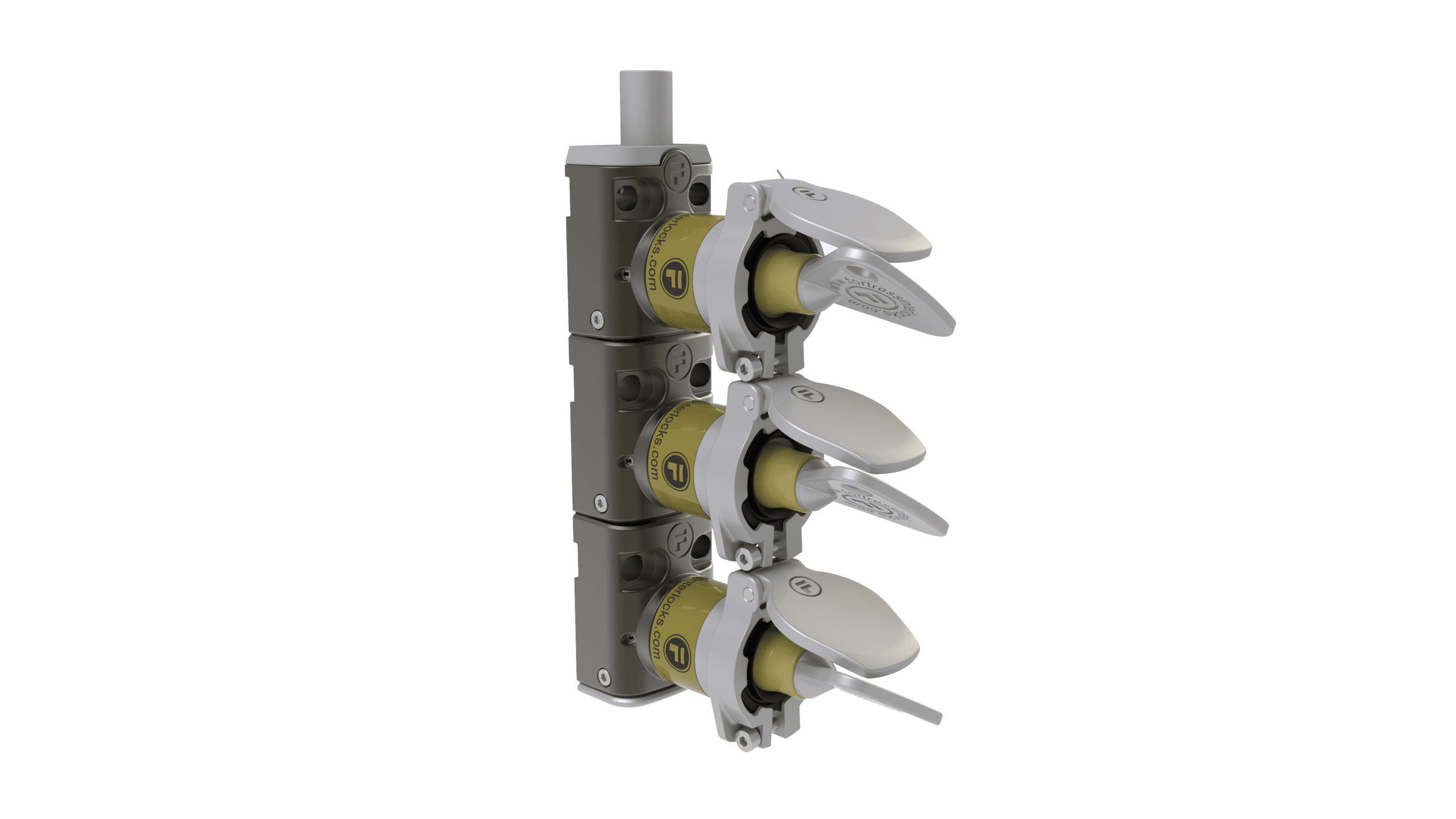
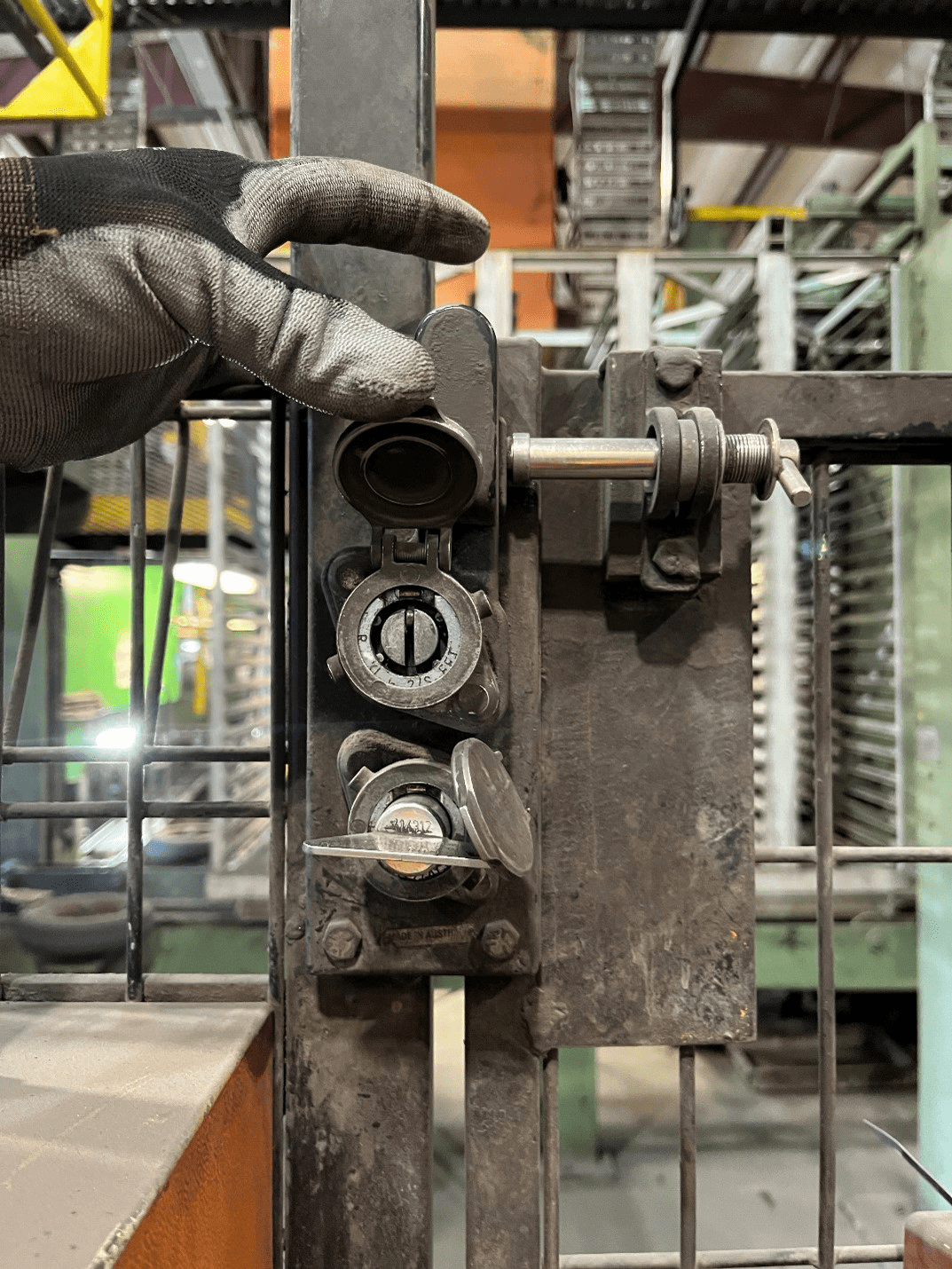
Fortress インターロックは、ロボットシステムにおける予期せぬ起動のリスクを低減するための製品を幅広く取り揃えています。完全機械式または電気機械式のゲートインターロックは、強制引抜セーフティキーなどの安全キーを装着することが可能です。また、既存のインターロックや配線を変更することなく、既存のシステムに追加できる機械式の後付け可能なインターロック遮断装置もご用意しています。
この記事で紹介した製品

amGardpro
 記事のダウンロードはこちら
記事のダウンロードはこちら