Wie Anwesenheitserkennungsgeräte die Mitarbeiter bei der Zusammenarbeit mit Robotern schützen können
Mit dem Aufkommen des kollaborierenden Roboters und dem Einsatz von Sicherheitsvorrichtungen mit Anwesenheitserkennung ist die langfristige Zukunft der festen Begrenzungen Bewachungein heißes Thema in Unternehmen, die eine Möglichkeit sehen, ihre Produktionsfläche zu reduzieren. Aber ist alles so, wie es zunächst scheint?
ISO13855 (2010) Sicherheitsmaschinen und präsenzerfassende Geräte
ISO13855 (2010) Sicherheit von Maschinen - Positionierungvon Schutzeinrichtungen im Hinblick auf Annäherungsgeschwindigkeiten von Körperteilen mag ein sperriger Titel sein und steht vielleicht nicht an erster Stelle in der Normenbibliothek eines jeden Sicherheitsbeauftragten ingenieur, aber er ist entscheidend, wenn es um die Gestaltung von Schutzeinrichtungen für Maschinen geht. In der Praxis sollten bei der Anwendung von Schutzvorrichtungen die Zeit, die die Maschine zum Anhalten benötigt (Anhalteleistung des Gesamtsystems), und der Mindestabstand zum Gefahrenbereich berücksichtigt werden. Werte für Annäherungsgeschwindigkeiten (Gehgeschwindigkeit und Bewegung der oberen Gliedmaßen) sind in ISO13855 angegeben und haben sich in der Praxis bewährt.
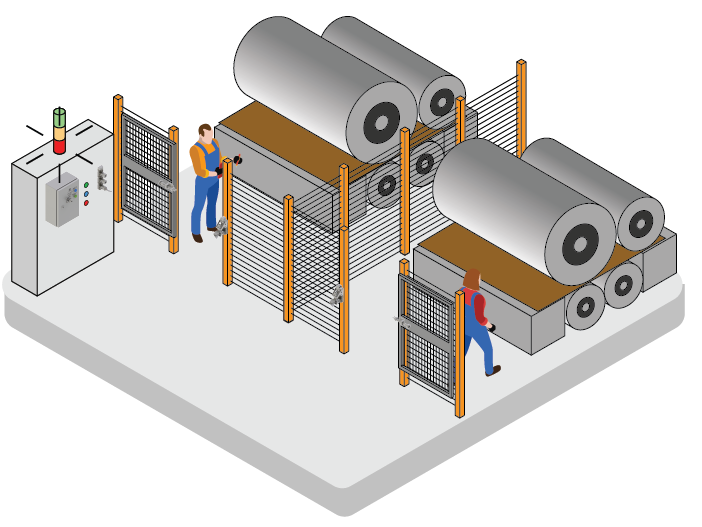
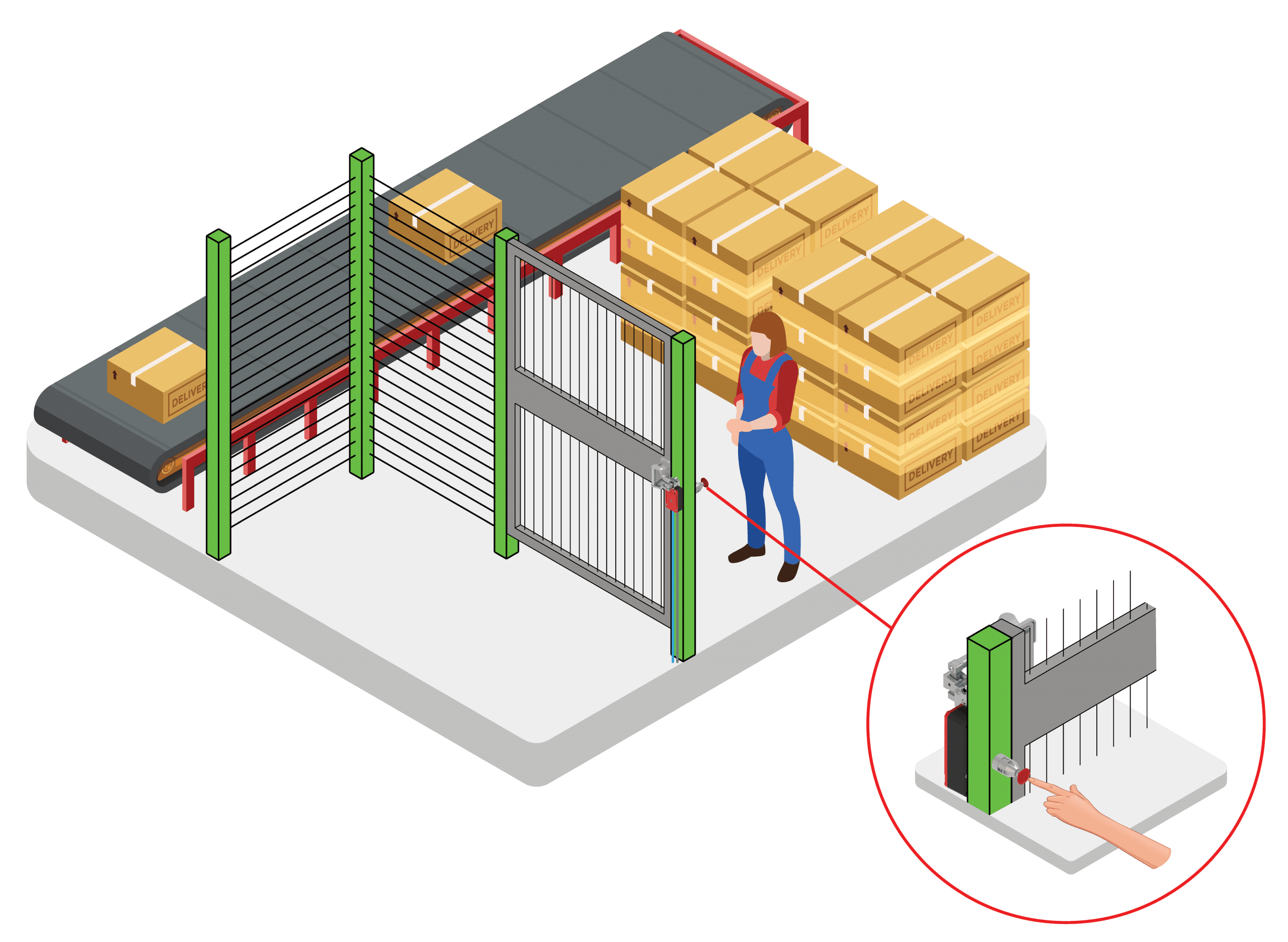
Wenn feststehende Bewachungdurch anwesenheitserkennende Sicherheitsvorrichtungen (wie z. B. Vorhänge, Druckmatten und Laserscanner) ersetzt werden, ist es von entscheidender Bedeutung, dass diese Vorrichtungen in einem Abstand installiert werden, der gewährleistet, dass der Bediener die Gefahr nicht erreichen kann, sobald ein Stoppbefehl ausgelöst wurde. Selbst wenn es den Anschein hat, dass eine Maschine "sofort" zum Stillstand kommt, muss der Konstrukteur der Schutzeinrichtungen die Reaktionszeit der Anwesenheitssensoren Sicherheitseinrichtungund Sicherheitsrelais(oder anderer Überwachungsgeräte) berücksichtigen. In Fällen, in denen es nicht möglich ist, eine Maschine mitten im Zyklus anzuhalten oder das Anhalteverhalten des Systems vorherzusagen, kann ISO13855 nicht angewendet werden, und logischerweise können Sicherheitseinrichtungen mit Anwesenheitserkennung nicht als primäres Mittel für Absicherung verwendet werden.
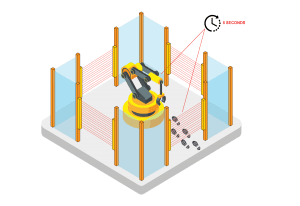
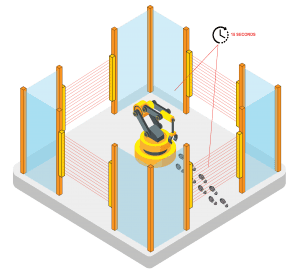
Der Mindestabstand zur Gefahr wird nach der folgenden Gleichung berechnet:
S =(K x T) + C
Wobei:
S ist der Mindestabstand in mm
K ist die Annäherungsgeschwindigkeit des Körpers oder von Körperteilen in mm/s
T ist die Gesamtanhaltezeit des Systems in Sekunden
C ist die Eindringdistanz in mm
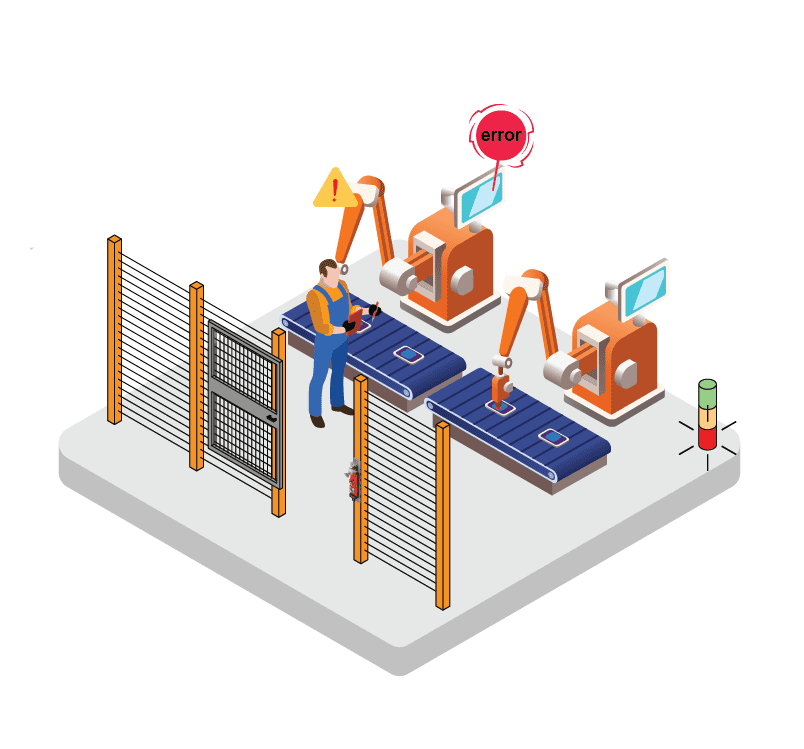
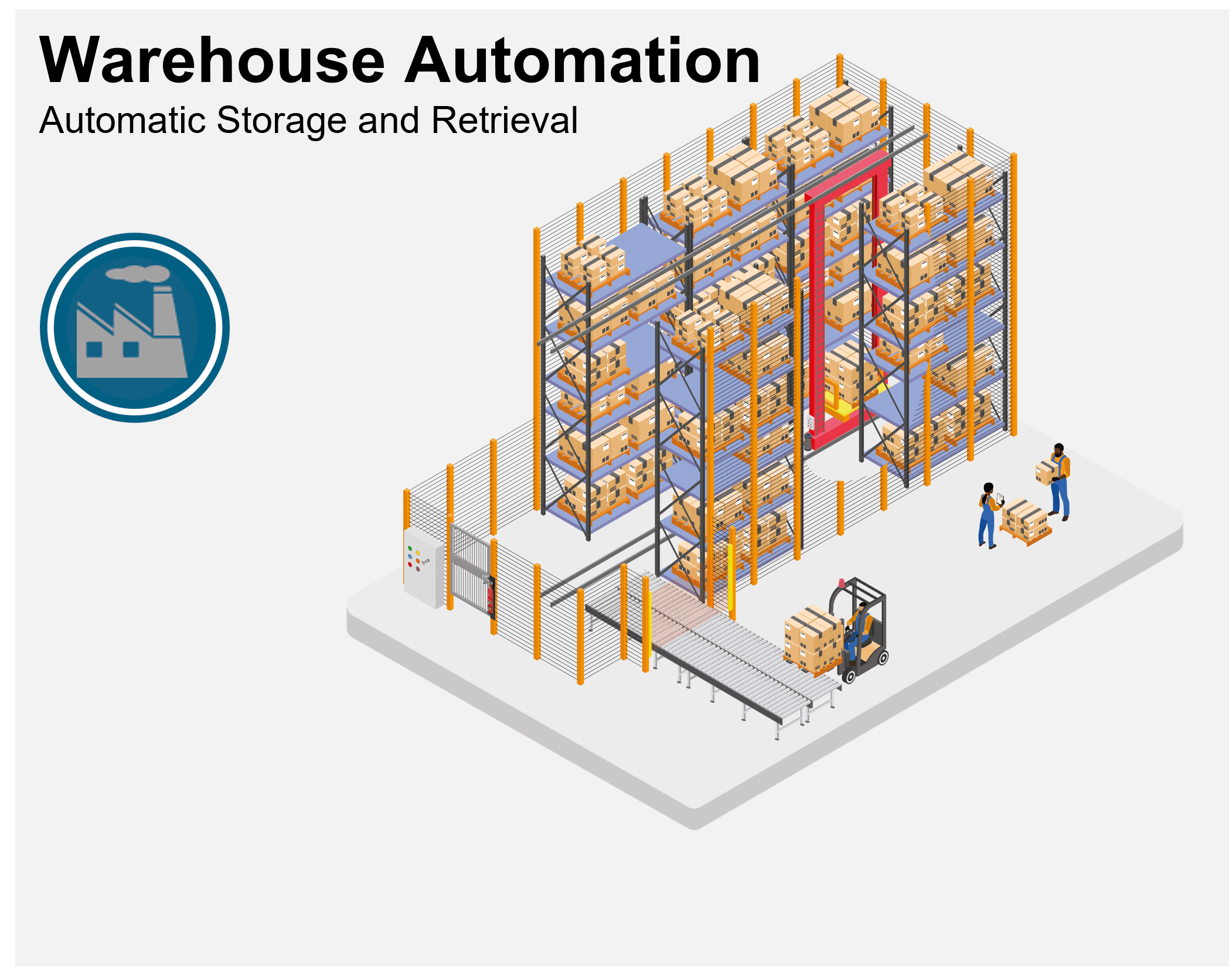
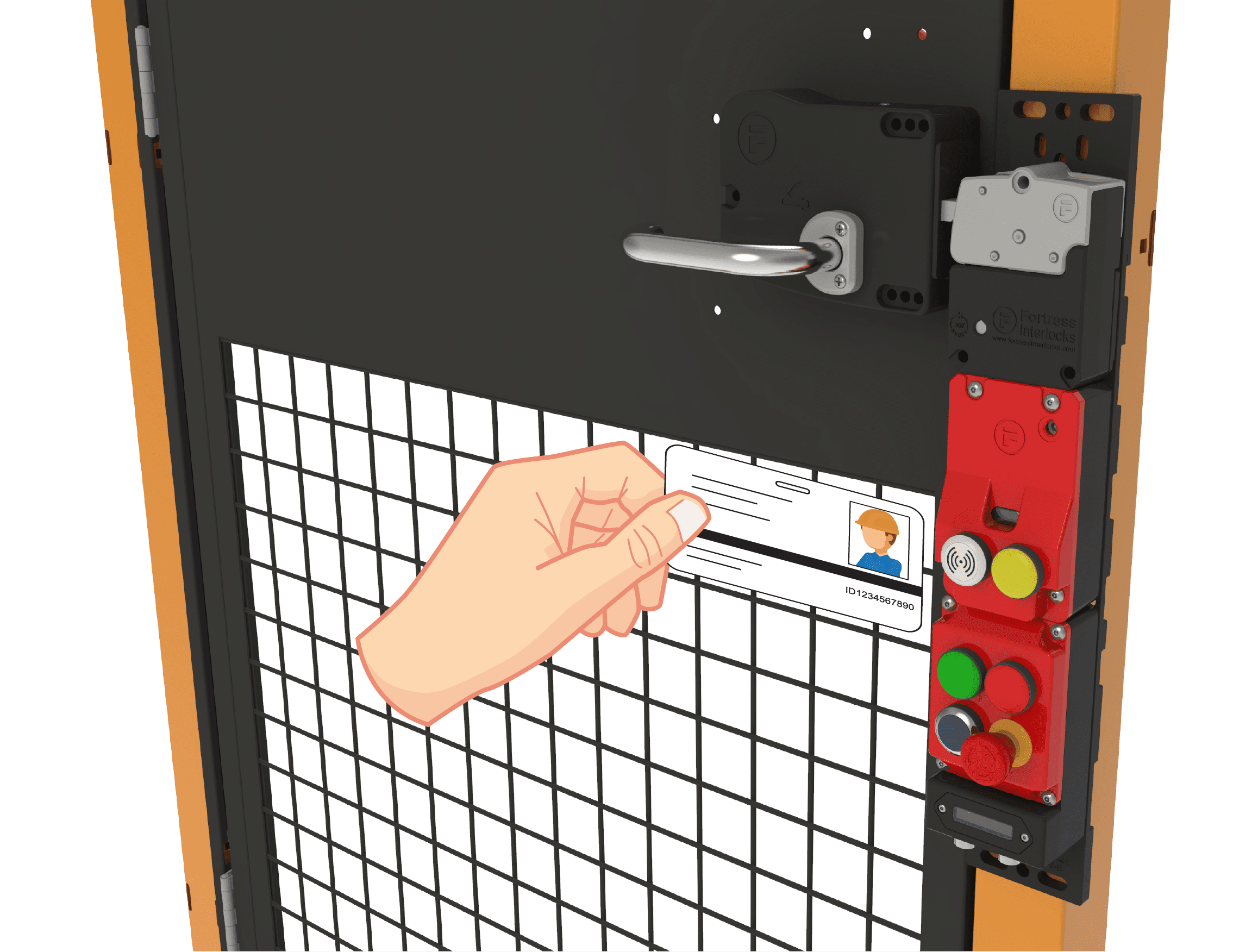
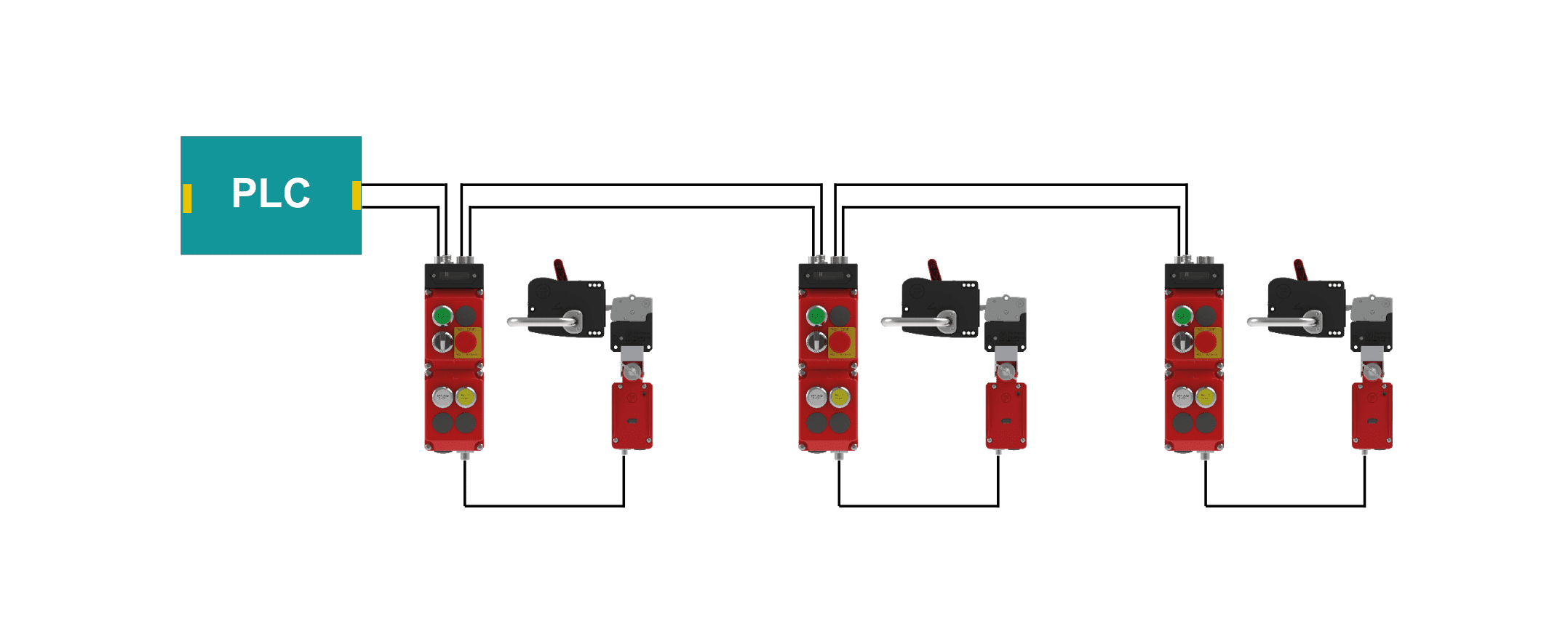
Während immer mehr kollaborierende Roboter in der Fertigungsumgebung eingesetzt werden, sehen wir auch den Aufstieg des "integriertFertigungssystems", bei dem zwei oder mehr Maschinen in Kombination arbeiten. Dies stellt eine Herausforderung für den Konstrukteur von Schutzvorrichtungen dar, da der Kontrollbereich eines einzelnen AbsicherungGeräts umfangreich und komplex sein kann. In diesem Szenario sind fest installierte physische Bewachungeine hervorragende Option, insbesondere in Verbindung mit ZuhaltungSicherheitsvorrichtungen und Personalschlüsseln zum Schutz des Bedienpersonals, das die Gesicherter Raum betritt.
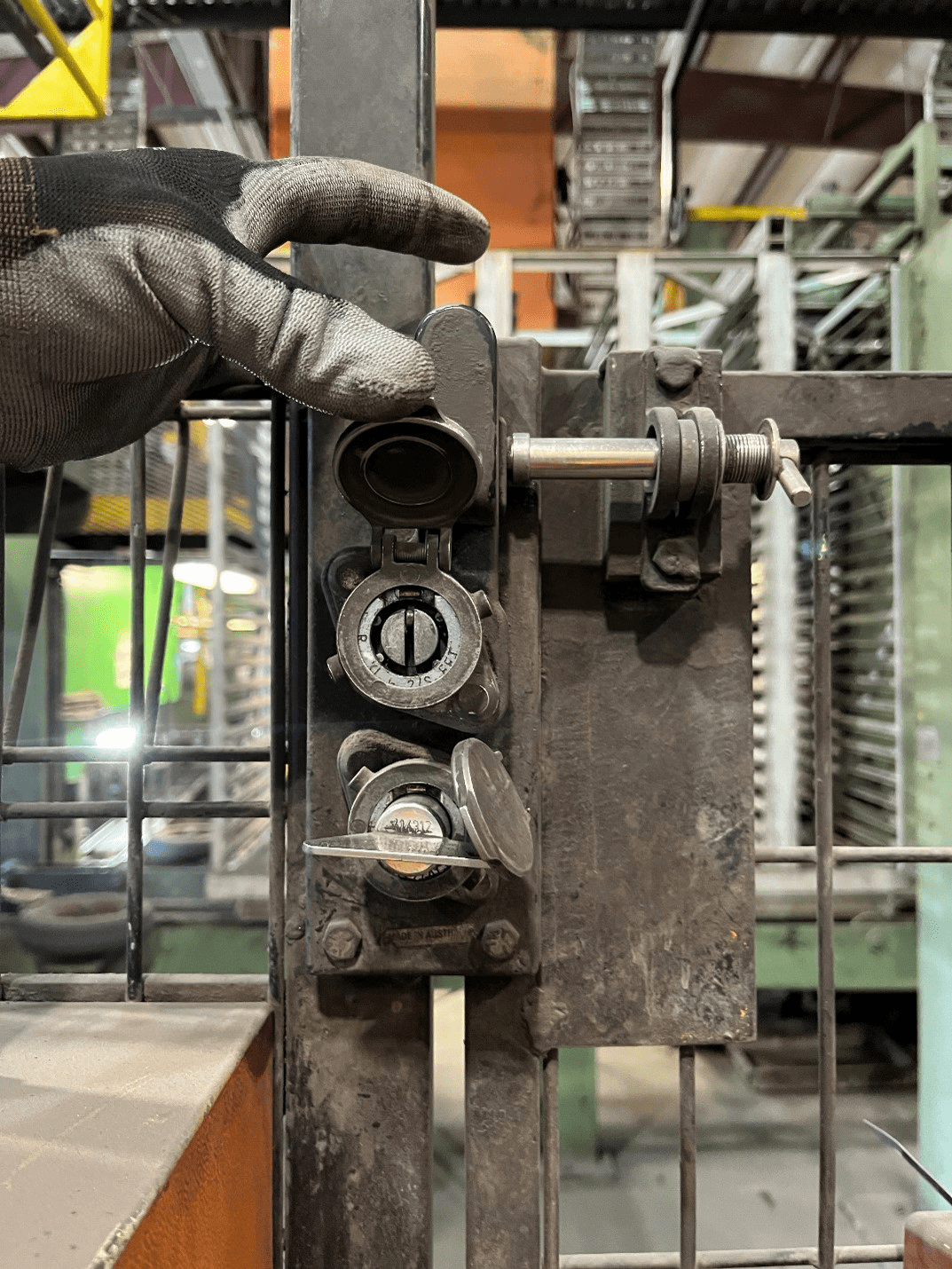
Feste Begrenzungen Bewachunghaben das Potenzial, den Platzbedarf in der Fertigung zu verringern, und haben den zusätzlichen Vorteil, dass sie den Austritt von Teilen oder Material von der Gesicherter Raum verhindern. Wenn Verriegelungen mit Zuhaltungverwendet werden, kann der Bediener erst dann Zugang zur Maschine erhalten, wenn diese sich in einem sicheren Zustand befindet.
Sicherheitsvorrichtungen mit Anwesenheitssensorik werden Hand in Hand mit der festen Bewachungarbeiten und haben ihre Berechtigung, aber die Realität ist, dass die feste Bewachungin der modernen Fertigungsumgebung bleiben wird und den Maschinenkonstrukteuren helfen wird, ihren Platz in der Fertigung zu reduzieren.
Produkte, die in diesem Artikel erwähnt werden
mGard
tGard
 Klicken Sie hier, um den Artikel herunterzuladen
Klicken Sie hier, um den Artikel herunterzuladenFallstudien
Verriegelung mit Schlüsseltransfer zur Verbesserung von Aussperrung/Blockierung
Fallstudien
Wie Sie Ihre Mitarbeiter schützen können - Ballenpressen in Recyclinganwendungen Teil 2
Fallstudien
Wie Sie Ihre Mitarbeiter schützen können - Ballenpressen in Recyclinganwendungen Teil 1
Fallstudien
Wie man Aspekte der Maschine auswählt Bewachung- Stärke des BewachungSystems
Fallstudien
Sicherer Zugang zu automatisierten Lager- und Bereitstellungssystemen
Fallstudien
Wie mechanische SchlüsseltransferVerriegeln Systeme erfüllen können PLe
Video

ISO/TR 22053 (2021) Sicherheit von Maschinen - AbsicherungUnterstützendes System
EN 528:2021 - Entwurf einer Absicherung Lösung
Automatisierte Speicher- und Abrufsysteme – Wie konzipieren Sie Ihre Sicherungslösung, um EN 528 zu erfüllen

Fallstudien
Wie Sie Ihre Mitarbeiter schützen können - Ballenpressen in Recyclinganwendungen Teil 2
Fallstudien
Wie Sie Ihre Mitarbeiter schützen können - Ballenpressen in Recyclinganwendungen Teil 1
Fallstudien

Bei der Erstellung eines Risikos Bewertung- Wie setze ich Prioritäten bei Maßnahmen zur Risikominderung?
Fallstudien
Wie man Aspekte der Maschine auswählt Bewachung- Stärke des BewachungSystems
Fallstudien
Zurücksetzen automatischer Geräte in einem nicht einsehbaren Bereich Gesicherter Raum
Fallstudien
Sicherheit bei Wartungsarbeiten - Verhinderung von Maschinenneustarts
Fallstudien
Sicherheitsspezifikationen: Sicherheitsintegritätsstufen, Leistungsstufen oder Kontrollzuverlässigkeit?
Fallstudien
Wie mechanische SchlüsseltransferVerriegeln Systeme erfüllen können PLe
Fallstudien
Wie man die zusätzliche Freigabe von geschützten Räumen in Betracht zieht
Fallstudien

Design zur Minimierung der Motivation, um die Möglichkeiten von Verriegelungauszuschalten
Fallstudien

Beispiel eines SchlüsseltransferVerriegeln Systems zur Steuerung von mehreren Energiequellen

Fallstudien
Was ist die Kontrolle gefährlicher Energie?
Erfahren Sie mehr über die Beherrschung gefährlicher Energien, ein Sicherheitsverfahren, das zur Vermeidung von Unfällen und Verletzungen durch die unbeabsichtigte Freisetzung von Energie aus Maschinen oder Geräten eingesetzt wird. Finden Sie heraus, warum die Beherrschung gefährlicher Energie wichtig ist und wie sie durch den Einsatz von Lockout-Tagout-Verfahren (LOTO) umgesetzt wird. Hilfe zur Beherrschung gefährlicher Energie und zur Maschinensicherheit erhalten Sie von Fortress Safety.
Video

Motivation zum Besiegen - Webinar
Die Nutzung von Betriebsarten und Sonderbetriebsarten kann für das Funktionieren von Maschinen entscheidend sein, aber wer kann sie nutzen?
Video

Modusauswahl und Zutrittskontrolle - Webinar
Die Nutzung von Betriebsarten und Sonderbetriebsarten kann für das Funktionieren von Maschinen entscheidend sein, aber wer kann sie nutzen?
Video
Webinar zur Risikominderung in der Logistik
In diesem Webinar werden die Maschinensicherheitsstandards, die für eine Vielzahl von Logistikeinrichtungen gelten, untersucht und ausgearbeitet.
Video
Zutrittskontrolleund Modusauswahl Webinar
Schauen Sie sich unser Webinar an, um mehr über Betriebsarten und den Zugang zu Maschinen nur für diejenigen zu erfahren, die für die gewählte Betriebsart autorisiert sind.
Video

Webinar zu sauberen Umgebungen
Die Sicherheit von Maschinen an diesen Orten kann eine Herausforderung sein, wenn es darum geht, mehrere Normen und Zulassungen zu erfüllen.
Video
Sicherheitslösungen für Kosteneinsparungen und Effizienzsteigerungen - Webinar
Fallstudien
Was bedeutet Kontrollzuverlässigkeit in ANSI B11.19-2019? Wie erfolgt der Vergleich mit den Leistungsstufen und -kategorien der ISO 13849-1?
Fallstudien

Wenn meine Maschine über eine Dauer für Herunterfahren verfügt - wie kann ich den Zugang nach dem Lockout Tagout nur dann erlauben, wenn es sicher ist?
Fallstudien
Bei der Erstellung eines Risikos Bewertung- Wie setze ich Prioritäten bei Maßnahmen zur Risikominderung?
Fallstudien
Beispiel eines SchlüsseltransferVerriegeln Systems zur Steuerung von mehreren Energiequellen
Fallstudien
Verbesserung von Lockout/Tagout-Verfahren - Wie führe ich eine vollständige Stromtrennung durch?
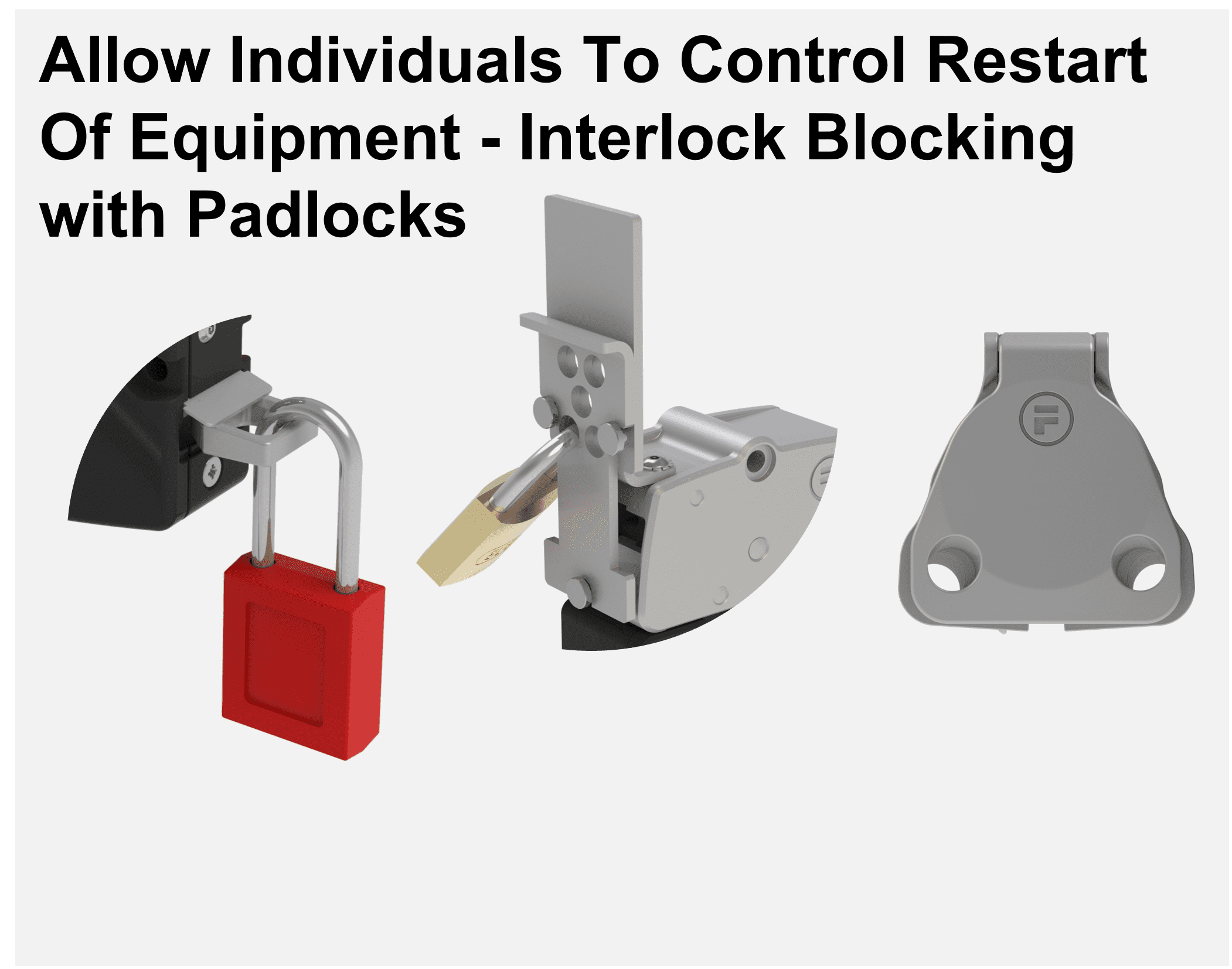
Erlauben Sie Personen, den Neustart von Geräten zu steuern – Verriegelungsvorrichtungen mit Vorhängeschlössern
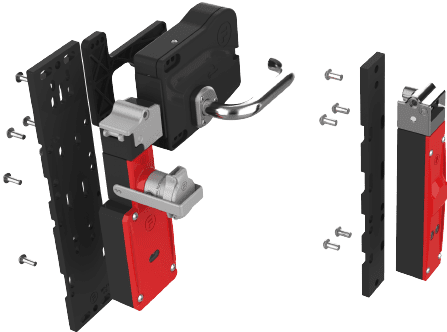
Wie kann eine Aussperrung oder Außerbetriebnahme in eine Schutzvorrichtung integriert werden?
Fallstudien
Was ist die Kontrolle gefährlicher Energie?
Erfahren Sie mehr über die Beherrschung gefährlicher Energien, ein Sicherheitsverfahren, das zur Vermeidung von Unfällen und Verletzungen durch die unbeabsichtigte Freisetzung von Energie aus Maschinen oder Geräten eingesetzt wird. Finden Sie heraus, warum die Beherrschung gefährlicher Energie wichtig ist und wie sie durch den Einsatz von Lockout-Tagout-Verfahren (LOTO) umgesetzt wird. Hilfe zur Beherrschung gefährlicher Energie und zur Maschinensicherheit erhalten Sie von Fortress Safety.