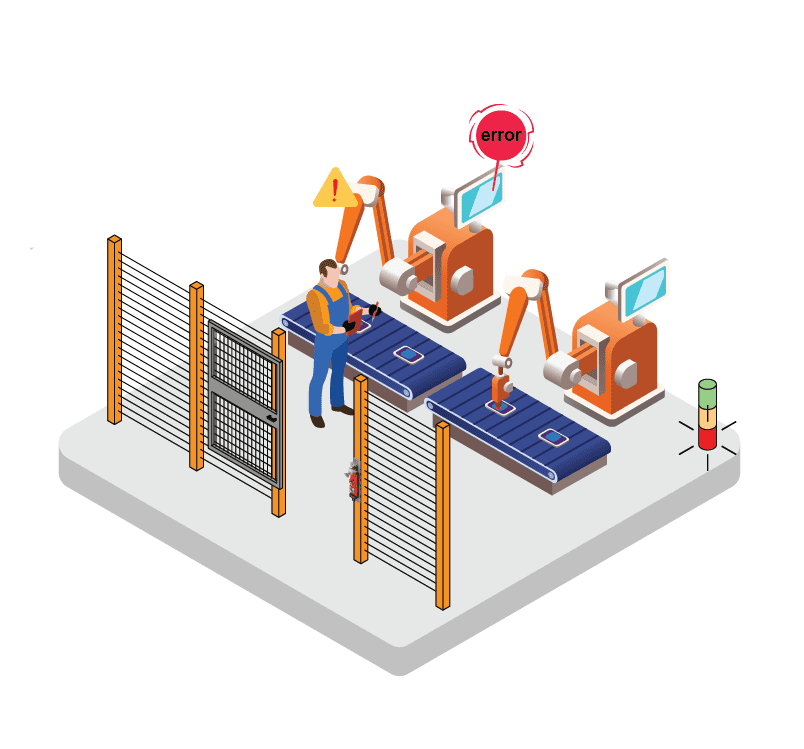
Come i dispositivi di rilevamento della presenza possono proteggere i dipendenti quando collaborano con i robot
Con l'avvento del robot collaborativo e l'uso di dispositivi di sicurezza che rilevano la presenza, il futuro a lungo termine delle protezioni perimetrali fisse è un argomento caldo nelle aziende che vedono un'opportunità per ridurre il loro spazio di produzione, ma è tutto come appare all'inizio?
ISO13855 (2010) Macchine di sicurezza e dispositivi di rilevamento della presenza
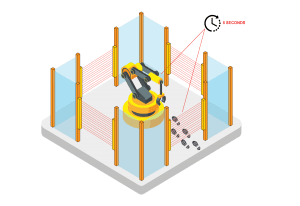
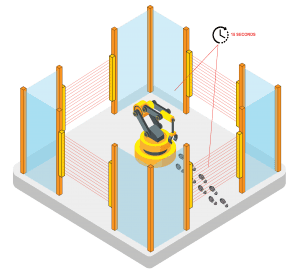
ISO13855 (2010) Safety of machinery - Positioning of safeguards with respect to the approach speeds of parts of the human body may an unwieldy title and might not be at the forefront of every safety engineer's library of standards but it is critical when it comes to the design of safeguards for machinery. In termini pratici l'applicazione delle protezioni dovrebbe prendere in considerazione il tempo necessario alla macchina per fermarsi (prestazioni generali di arresto del sistema) e la distanza minima dalla zona di pericolo. I valori per le velocità di avvicinamento (velocità di camminata e movimento degli arti superiori) sono forniti nella ISO13855 e sono provati dall'esperienza pratica.
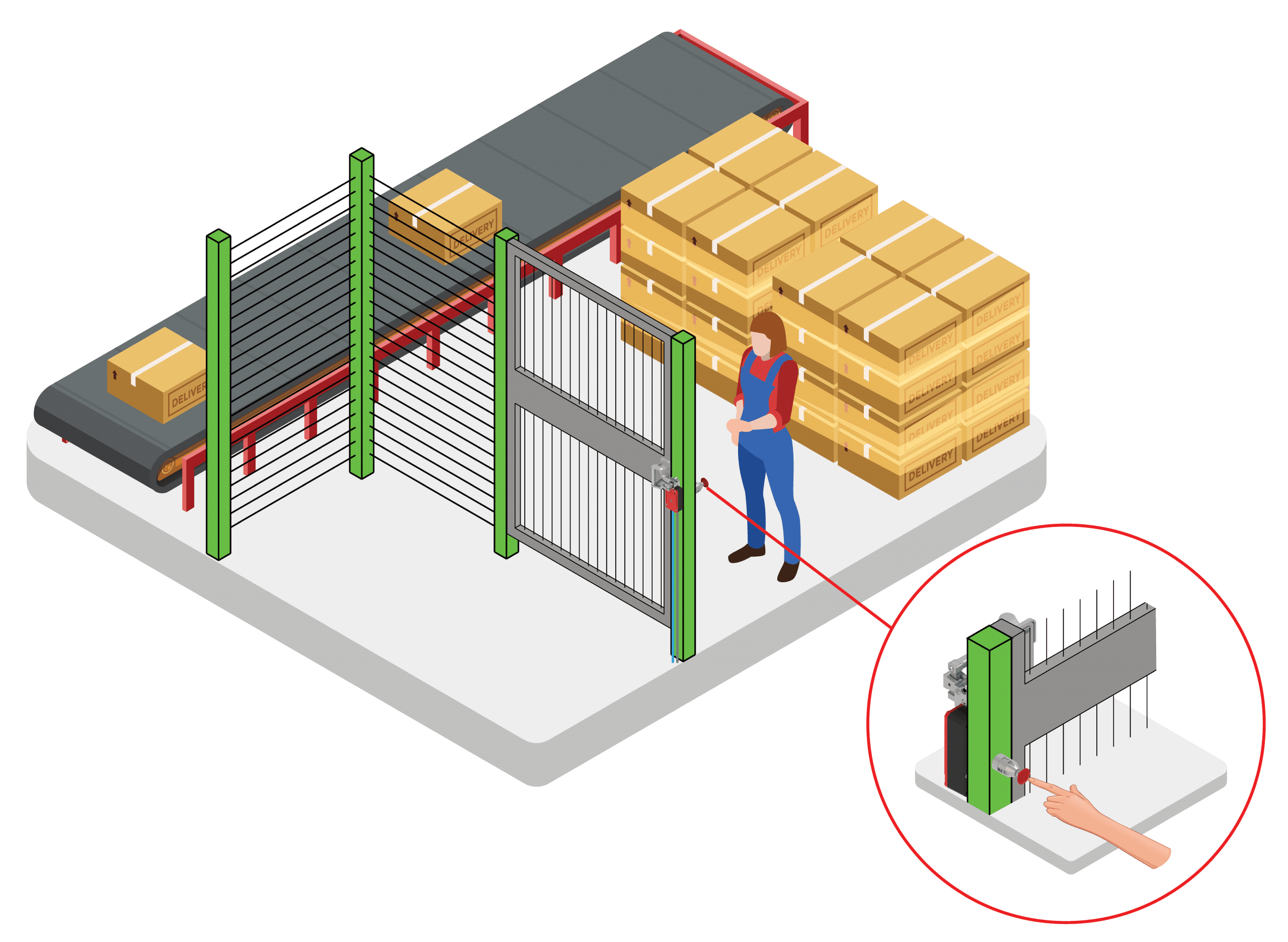
Quando le protezioni fisse vengono sostituite da dispositivi di sicurezza a rilevamento di presenza (come barriere fotoelettriche, tappeti a pressione e scanner laser), è fondamentale che questi dispositivi siano installati a una distanza tale da garantire che l'operatore non possa raggiungere il pericolo una volta generato il comando di arresto. Anche quando sembra che una macchina si arresti "istantaneamente", il progettista delle protezioni deve considerare il tempo di risposta del dispositivo di sicurezza di rilevamento della presenza e del relè di sicurezza (o altro dispositivo di monitoraggio). Nei casi in cui non è possibile arrestare una macchina a metà ciclo o prevedere le prestazioni di arresto del sistema, la ISO13855 non può essere applicata e logicamente i dispositivi di sicurezza a rilevamento di presenza non possono essere utilizzati come mezzo primario di salvaguardia.
La distanza minima dal pericolo si calcola con l'equazione
S =(K x T) + C
Dove:
S è la distanza minima in mm
K è la velocità di avvicinamento in mm/s del corpo o delle parti del corpo
T è il tempo complessivo di arresto del sistema in secondi
C è la distanza di intrusione in mm
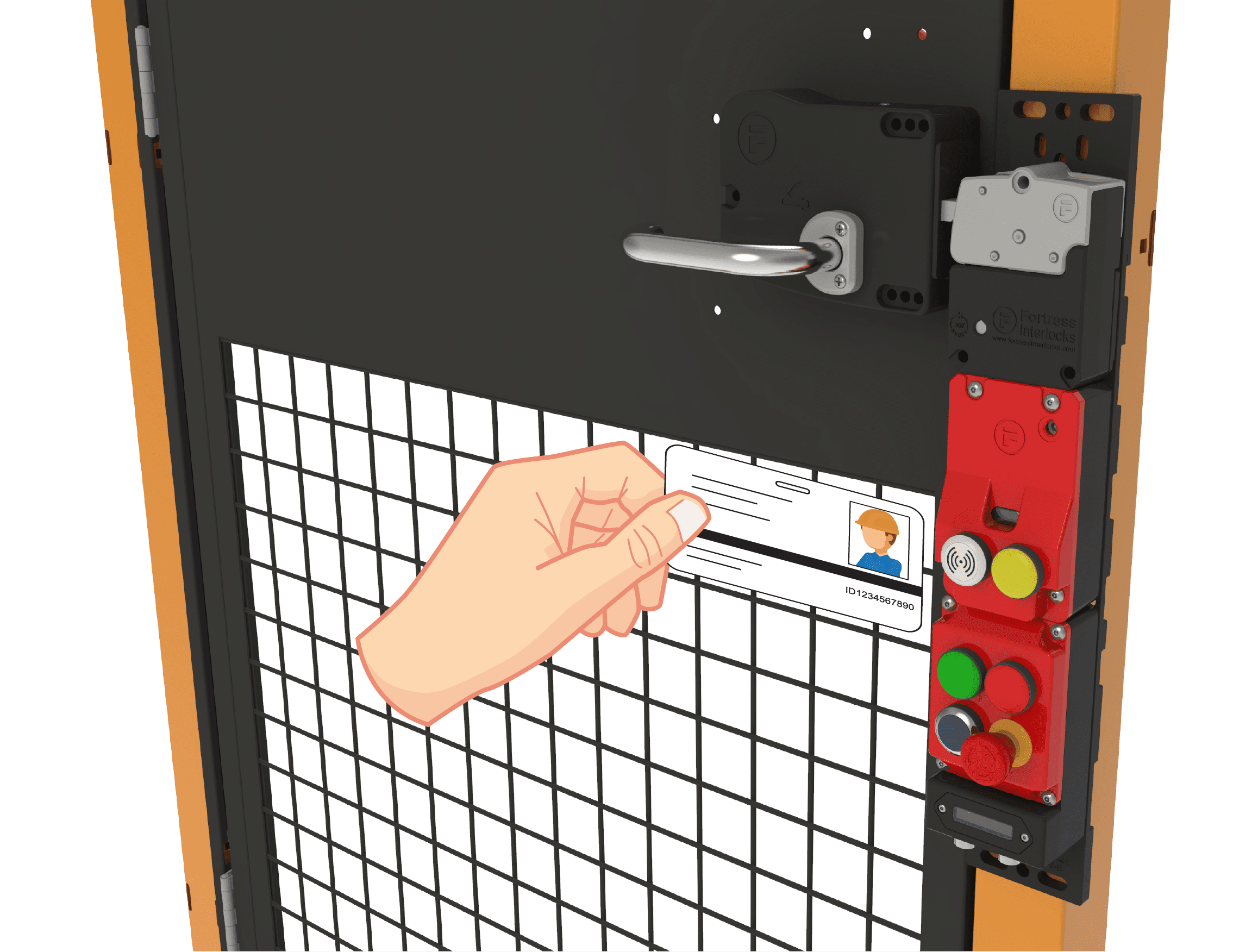
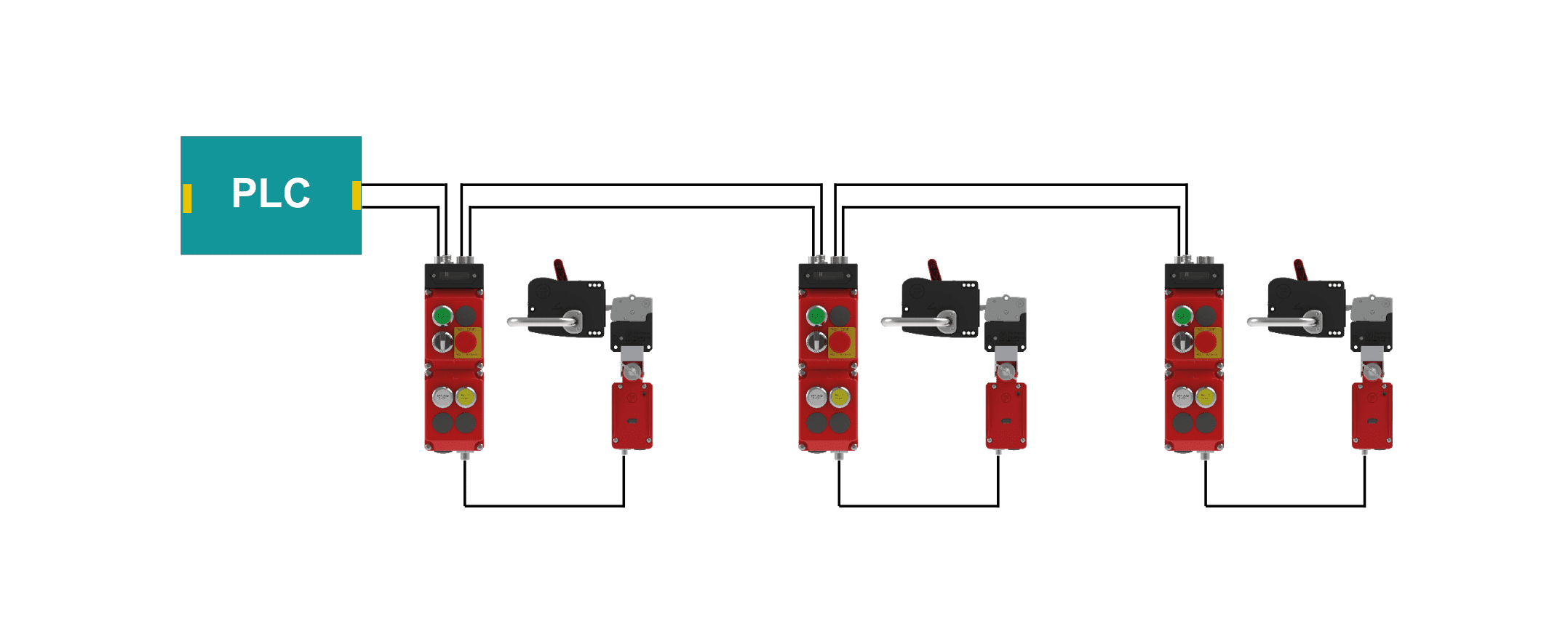
Mentre sempre più robot collaborativi vengono utilizzati nell'ambiente di produzione, stiamo anche assistendo all'aumento del "sistema di produzione integrato" in cui due o più macchine lavorano in combinazione. Questo crea una sfida per il progettista di protezioni dove l'ambito di controllo di un singolo dispositivo di protezione potrebbe essere esteso e complesso. È in questo scenario che la protezione fisica perimetrale fissa rappresenta un'opzione eccellente, in particolare in combinazione con i dispositivi di sicurezza blocco di protezionee le chiavi per il personale per proteggere gli operatori che entrano in spazio protetto.
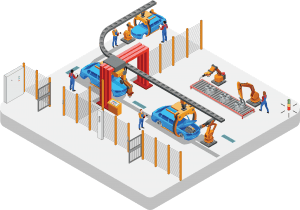
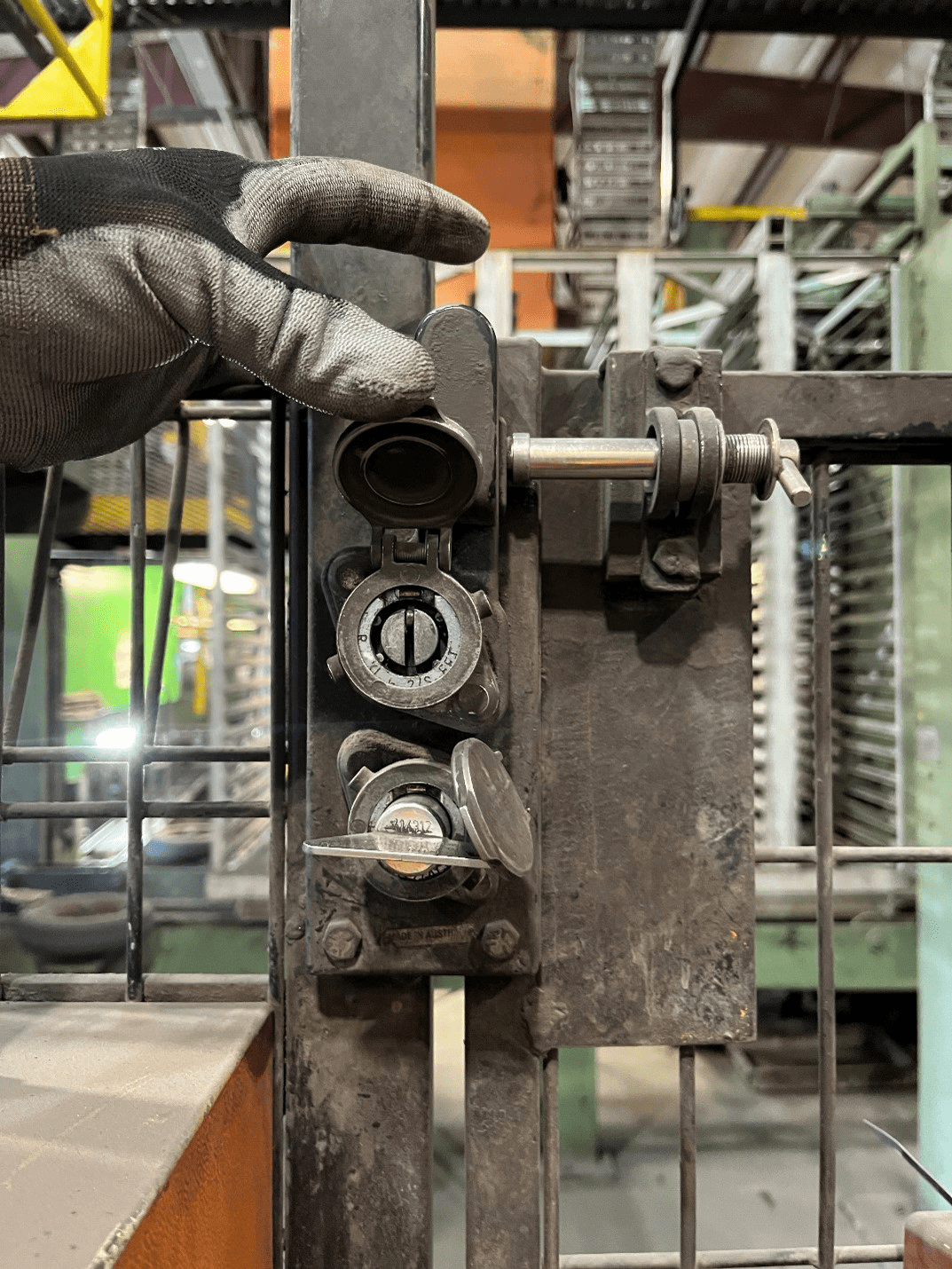
Le protezioni perimetrali fisse hanno il potenziale di ridurre l'ingombro della produzione, hanno l'ulteriore vantaggio di impedire l'uscita di parti o materiale dal spazio protetto, e quando si usano interblocchi con blocco di protezionel'operatore non può accedere alla macchina finché non è in uno stato sicuro.
I dispositivi di sicurezza a rilevamento di presenza lavoreranno di pari passo con le protezioni fisse e hanno il loro posto, ma la realtà è che le protezioni fisse sono qui per rimanere nell'ambiente di produzione moderno e aiuteranno anche i progettisti di macchine a ridurre il loro impatto sulla produzione.
Prodotti menzionati in questo articolo
mGard
tGard
 Clicca qui per scaricare l'articolo
Clicca qui per scaricare l'articolocasi di studio
Utilizzo dell'interblocco a chiave bloccata per potenziare la procedura di lockout/tagout
casi di studio
Come mantenere i dipendenti al sicuro - Presse per balle in applicazioni di riciclaggio Pt. 2
casi di studio
Come mantenere i dipendenti al sicuro - Presse per balle in applicazioni di riciclaggio Pt. 1
casi di studio
Come selezionare gli aspetti della protezione delle macchine - Forza del sistema di protezione
casi di studio
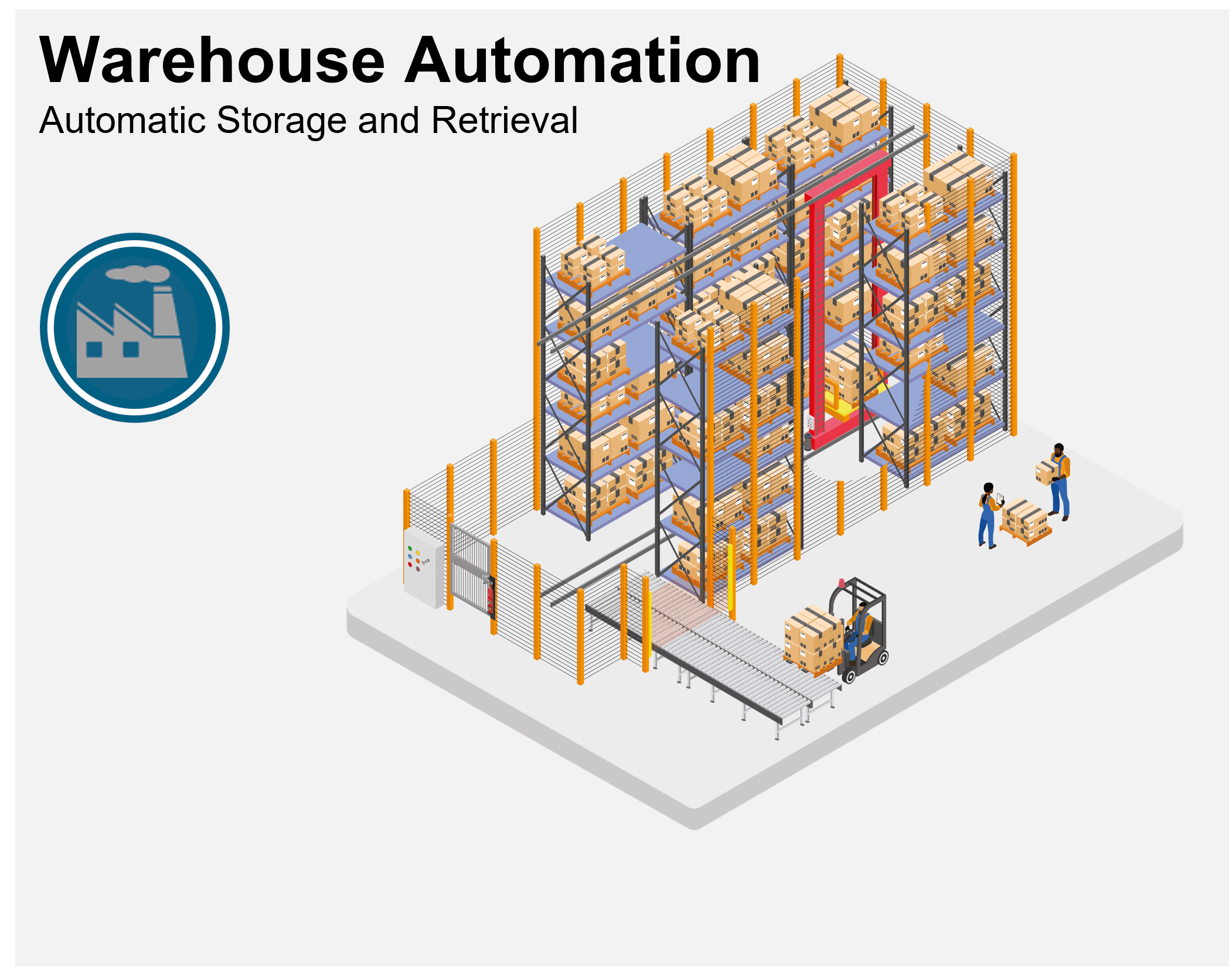
Ottenere un accesso sicuro ai sistemi di stoccaggio e recupero automatizzati
casi di studio
Come interblocco meccanico a chiave bloccataI sistemi possono soddisfare PLe
Video

ISO/TR 22053 (2021) Sicurezza del macchinario - Sistema di supporto alla salvaguardia
EN 528:2021 - Progettazione di una soluzione di sicurezza
Sistemi di archiviazione e recupero automatizzati – Come progettare la propria soluzione di protezione per soddisfare la norma EN 528

casi di studio
Come mantenere i dipendenti al sicuro - Presse per balle in applicazioni di riciclaggio Pt. 2
casi di studio
Come mantenere i dipendenti al sicuro - Presse per balle in applicazioni di riciclaggio Pt. 1
casi di studio

Quando si completa una valutazione del rischio - come si fa a dare priorità alle misure di riduzione del rischio?
casi di studio
Come selezionare gli aspetti della protezione delle macchine - Forza del sistema di protezione
casi di studio
Come reimpostare le attrezzature automatizzate all'interno di un spazio protettodove non c'è visibilità
casi di studio
Come essere sicuri durante le attività di manutenzione - prevenire il riavvio della macchina
casi di studio
Specifiche di sicurezza: Livelli di integrità di sicurezza, livelli di prestazione o affidabilità di controllo?
casi di studio
Come interblocco meccanico a chiave bloccataI sistemi possono soddisfare PLe
casi di studio

Design per ridurre al minimo la motivazione per sconfiggere le possibilità di dispositivi di interblocco
casi di studio

Esempio di un sistema di interblocco a chiave intrappolata nel controllo di fonti di energia multiple

casi di studio
Che cos'è il controllo dell'energia pericolosa?
Imparate a conoscere il controllo dell'energia pericolosa, una procedura di sicurezza utilizzata per prevenire incidenti e infortuni causati dal rilascio involontario di energia da macchinari o attrezzature. Scoprite perché il controllo dell'energia pericolosa è importante e come si attua attraverso l'uso di procedure di lock out tag out (LOTO). Per ottenere assistenza sul controllo dell'energia pericolosa e sulla sicurezza dei macchinari, consultate il sito Fortress Safety.
Video

Motivazione alla sconfitta - Webinar
L'uso di modalità di funzionamento e di modalità speciali può essere fondamentale per il funzionamento delle macchine, ma chi può utilizzarle?
Video

Selezione della modalità e controllo dell'accesso - Webinar
L'uso di modalità di funzionamento e di modalità speciali può essere fondamentale per il funzionamento delle macchine, ma chi può utilizzarle?
Video
Webinar sulla riduzione del rischio nella logistica
Questo webinar esplorerà e illustrerà gli standard di sicurezza dei macchinari che si applicano a un'ampia gamma di strutture logistiche.
Video
controllo dell'accessoe Webinar sulla selezione della modalità
Guarda il nostro webinar per capire meglio le modalità di funzionamento e fornire l'accesso ai macchinari solo a coloro che sono autorizzati per la modalità di funzionamento selezionata.
Video

Webinar sugli ambienti puliti
La sicurezza dei macchinari in questi luoghi può essere impegnativa quando si cerca di soddisfare diversi standard e approvazioni.
casi di studio
Che cos'è l'affidabilità del controllo nella norma ANSI B11.19-2019? Come si confronta con i livelli e le categorie di prestazioni della norma ISO 13849-1?
casi di studio

Se la macchina è dotata di tempo di arresto , come si può consentire l'accesso dopo il blocco e il tagout solo quando è sicuro?
casi di studio
Quando si completa una valutazione del rischio - come si fa a dare priorità alle misure di riduzione del rischio?
casi di studio
Esempio di un sistema di interblocco a chiave intrappolata nel controllo di fonti di energia multiple
casi di studio
Migliorare le procedure di lockout/tagout - Come si esegue l'isolamento della potenza completa?
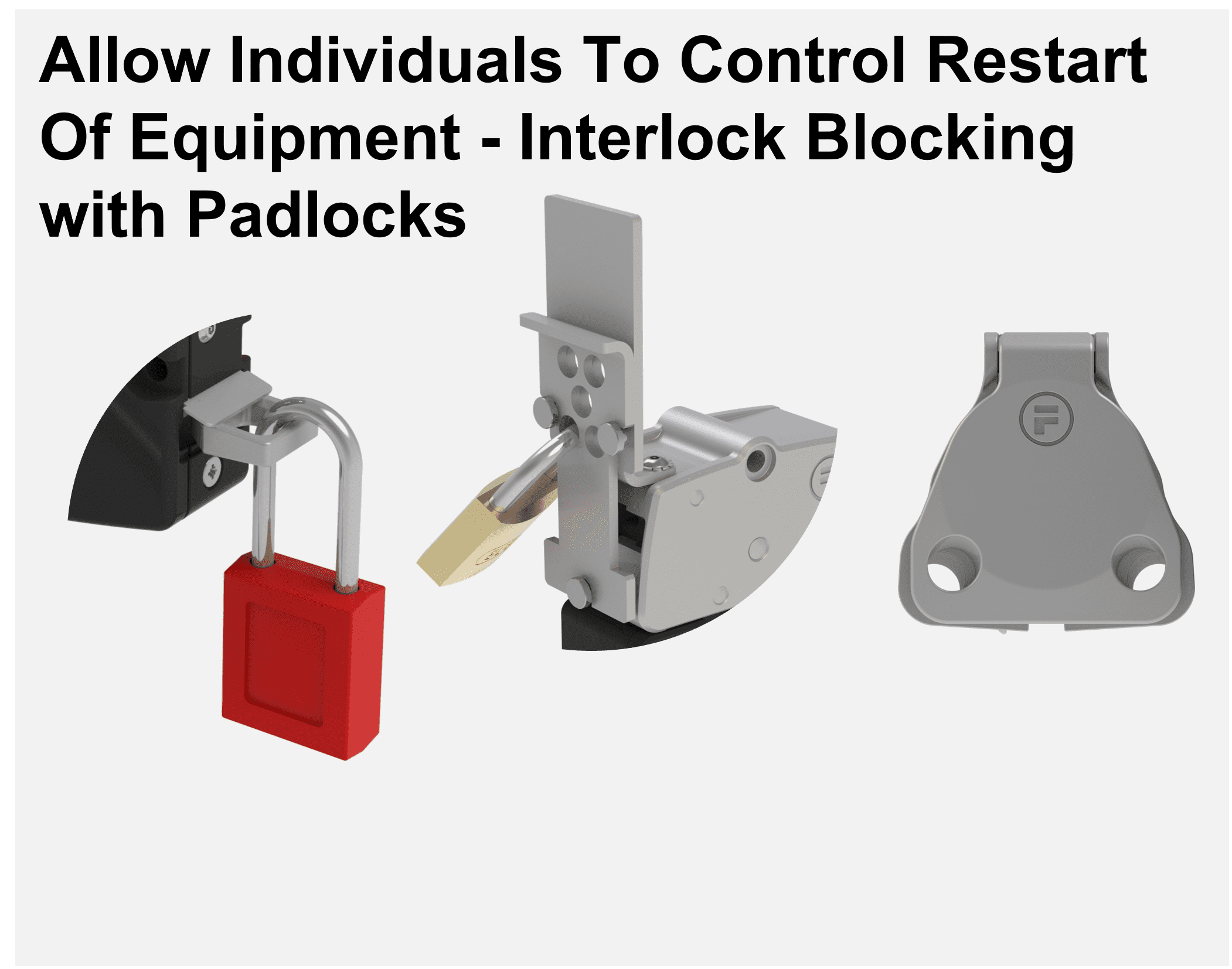
Consentii il controllo del riavvio dell'attrezzatura: blocco dell'interblocco con lucchetti
In che modo una funzione lockout/tagout può essere inclusa in un dispositivo di protezione?
casi di studio
Che cos'è il controllo dell'energia pericolosa?
Imparate a conoscere il controllo dell'energia pericolosa, una procedura di sicurezza utilizzata per prevenire incidenti e infortuni causati dal rilascio involontario di energia da macchinari o attrezzature. Scoprite perché il controllo dell'energia pericolosa è importante e come si attua attraverso l'uso di procedure di lock out tag out (LOTO). Per ottenere assistenza sul controllo dell'energia pericolosa e sulla sicurezza dei macchinari, consultate il sito Fortress Safety.