存在感设备如何在与机器人协作时保护员工
随着协作机器人的出现和存在感安全装置的使用,固定周界防护的长期前景是企业看到减少制造空间的机会的一个热门话题,但一切是否如其最初所见?
ISO13855(2010)安全机械和存在感测装置
ISO13855(2010)《机械安全--相对于人体各部分接近速度的保障措施定位》可能是一个笨重的标题,可能不是每个安全工程师的标准库中最重要的内容,但在设计机械的保障措施时,它是至关重要的。在实际应用中,保障措施的应用应考虑到机器 停止所需的时间(整体系统停止性能)和到危险区的最小距离。ISO13855中提供了接近速度(步行速度和上肢运动)的数值,并在实际经验中得到了证明。
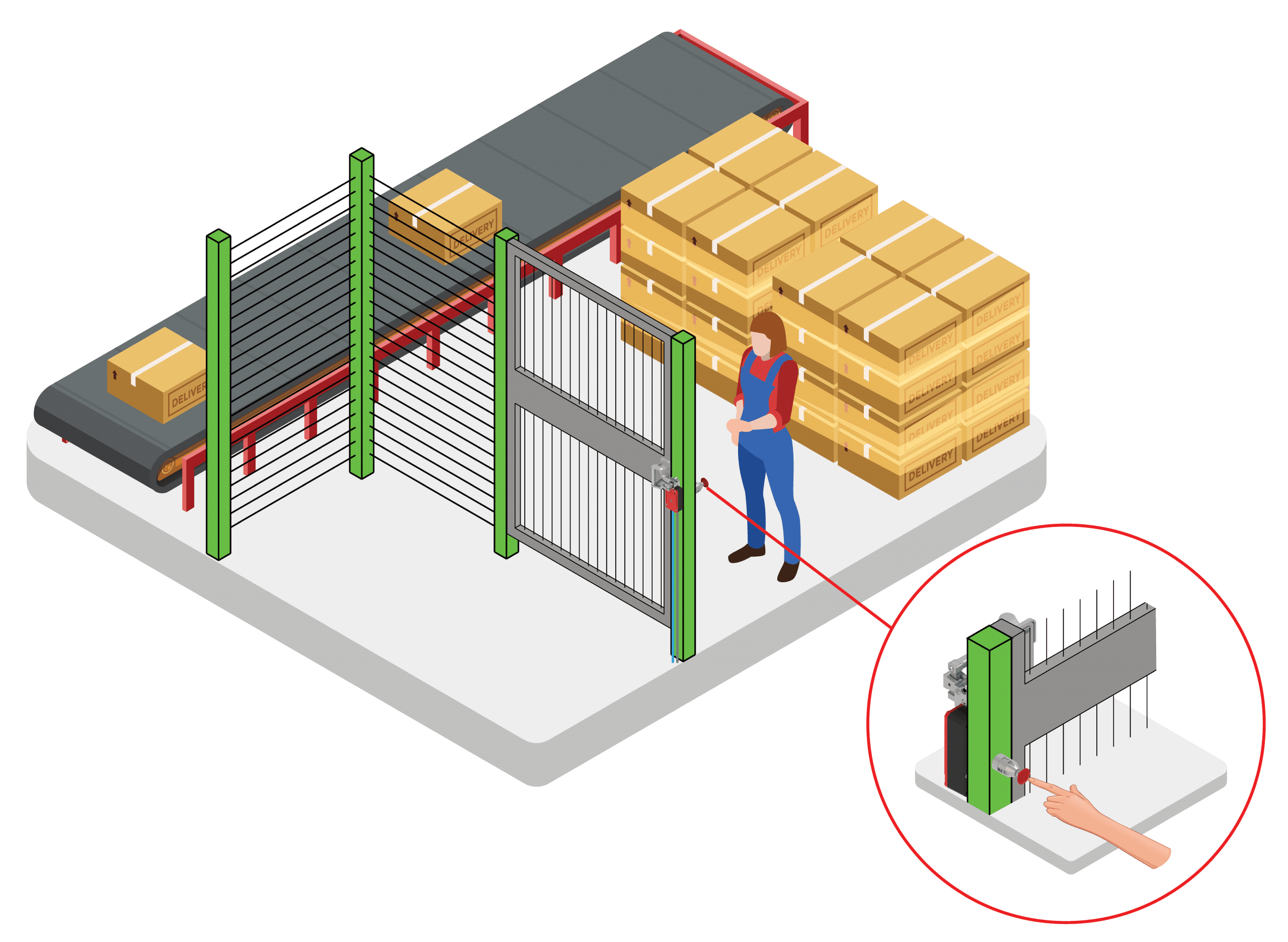
当固定防护被存在感安全装置(如光幕、压力垫和激光扫描器)取代时,至关重要的是,这些装置的安装距离应确保一旦产生停止指令,操作人员就无法接触到危险。即使看起来机器 "瞬间 "停止,保障措施的设计者也必须考虑存在感测安全装置和安全继电器(或其他监控装置)的响应时间。在无法在周期中停止机器 或预测系统停止性能的情况下,不能应用ISO13855,从逻辑上讲,存在感安全装置不能作为主要的保障手段。
与危险的最小距离是用公式计算的。
S=(KxT) +C
其中。
S是最小的距离,单位是毫米
K是身体或身体各部分的接近速度,单位是毫米/秒
T是整个系统的停止时间,以秒计
C是入侵的距离,单位是毫米
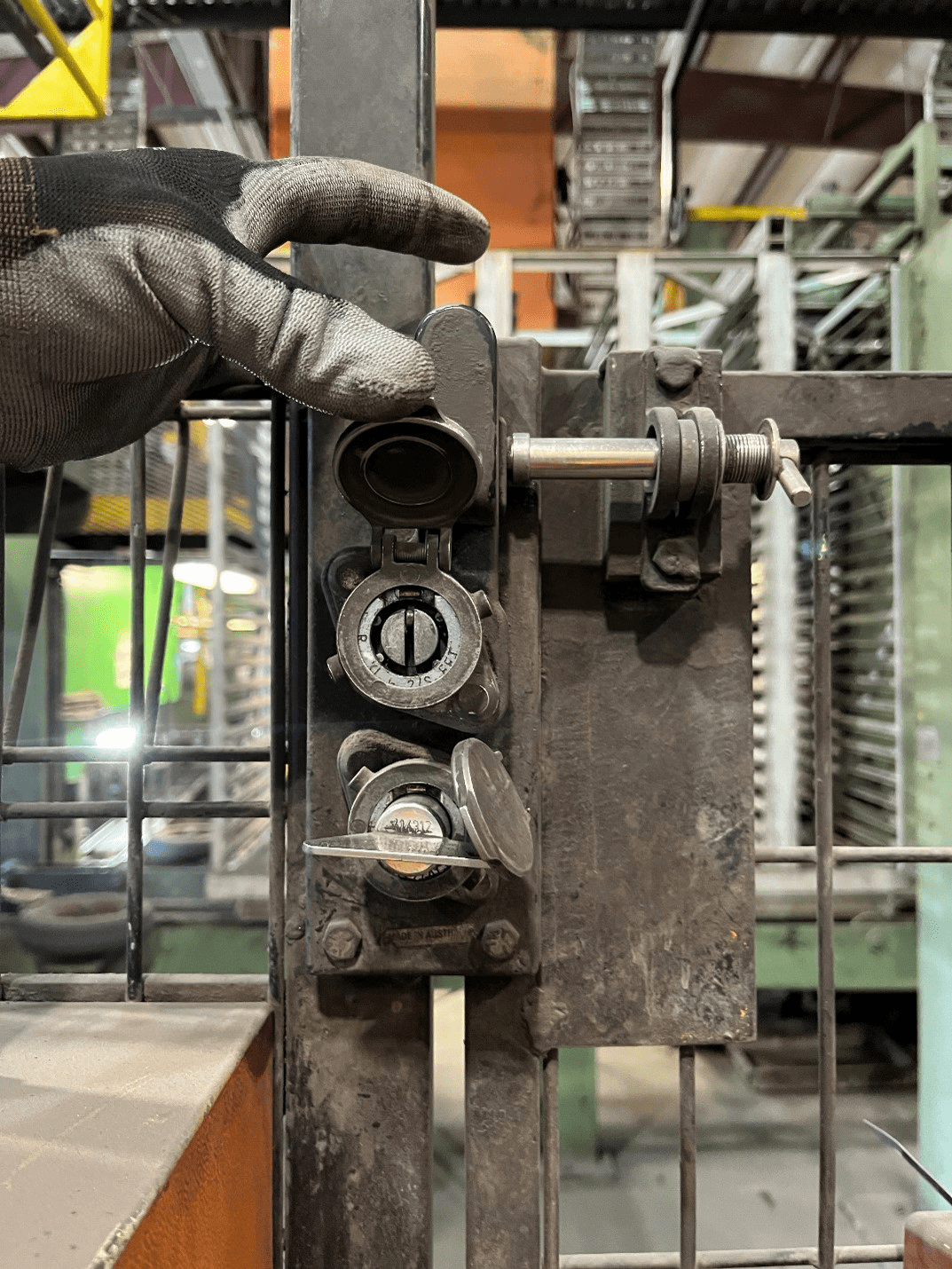
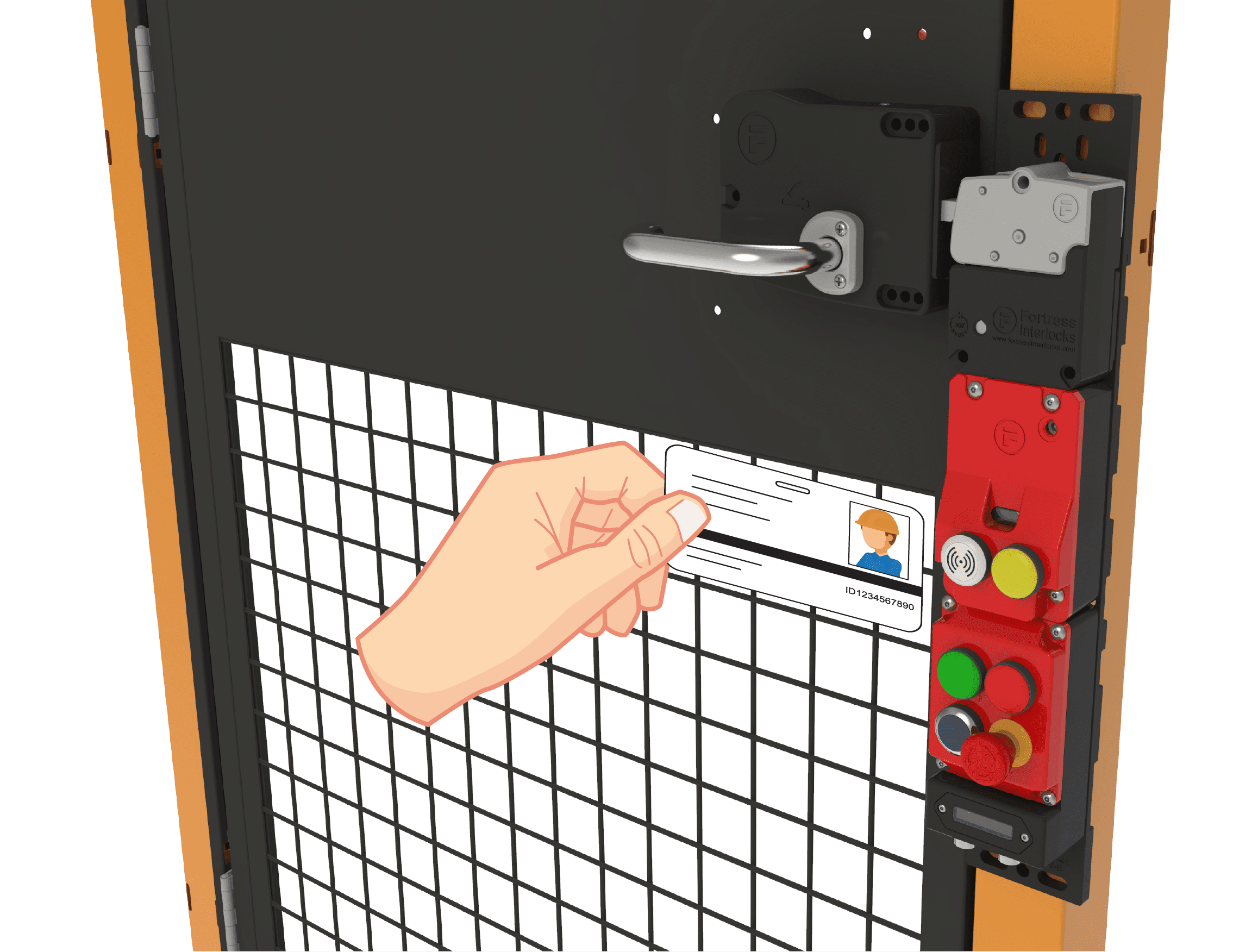
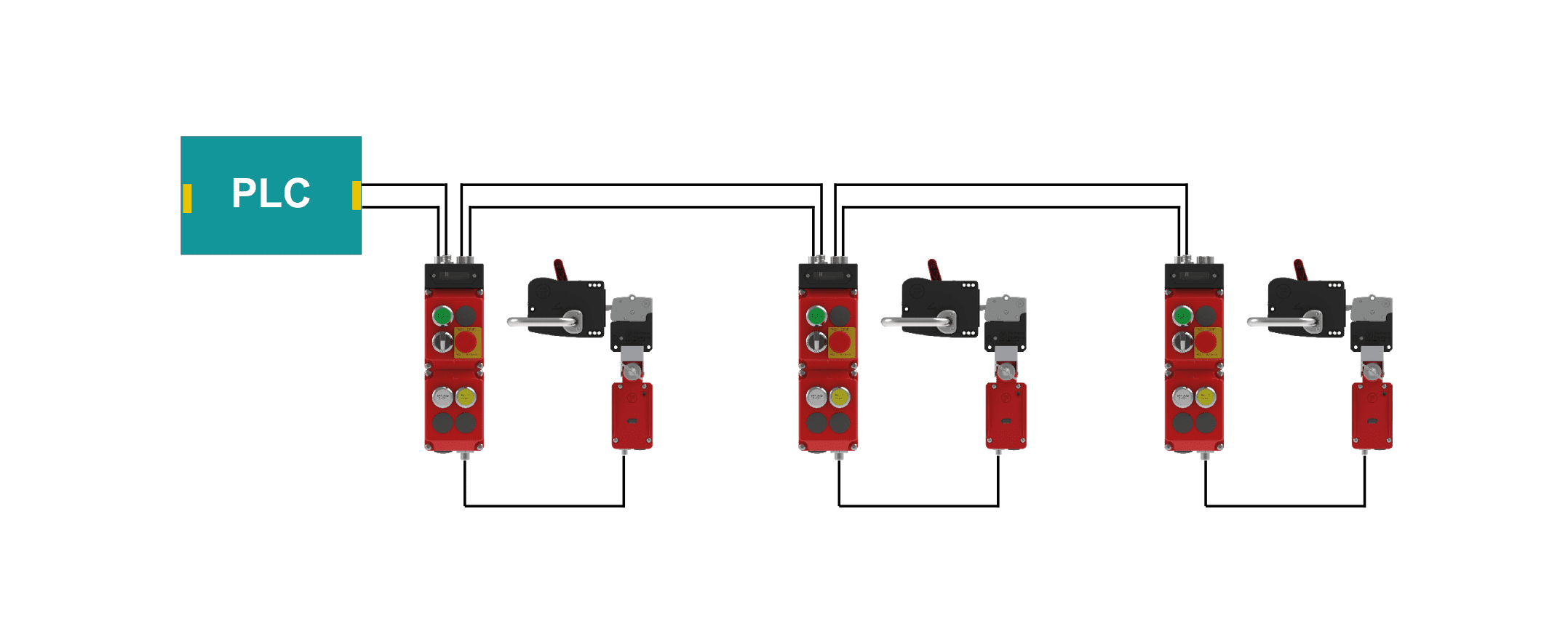
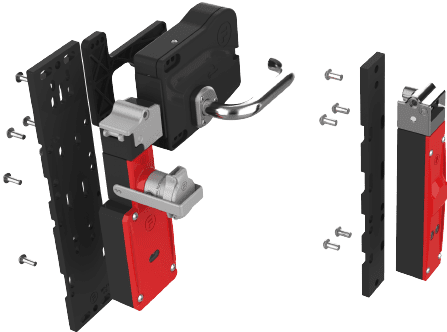
在制造环境中使用越来越多的协作机器人的同时,我们也看到了 "集成制造系统 "的兴起,在这种系统中,两台或更多的机器结合在一起工作。这给防护装置的设计者带来了挑战,因为单个防护装置的控制范围可能很广,很复杂。正是在这种情况下,固定周界物理防护提供了一个很好的选择,特别是与安全防护锁定 设备和人员钥匙相结合,保护进入受保护的空间 。
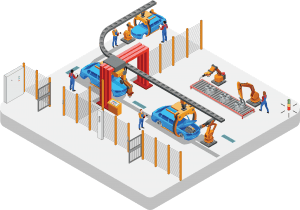
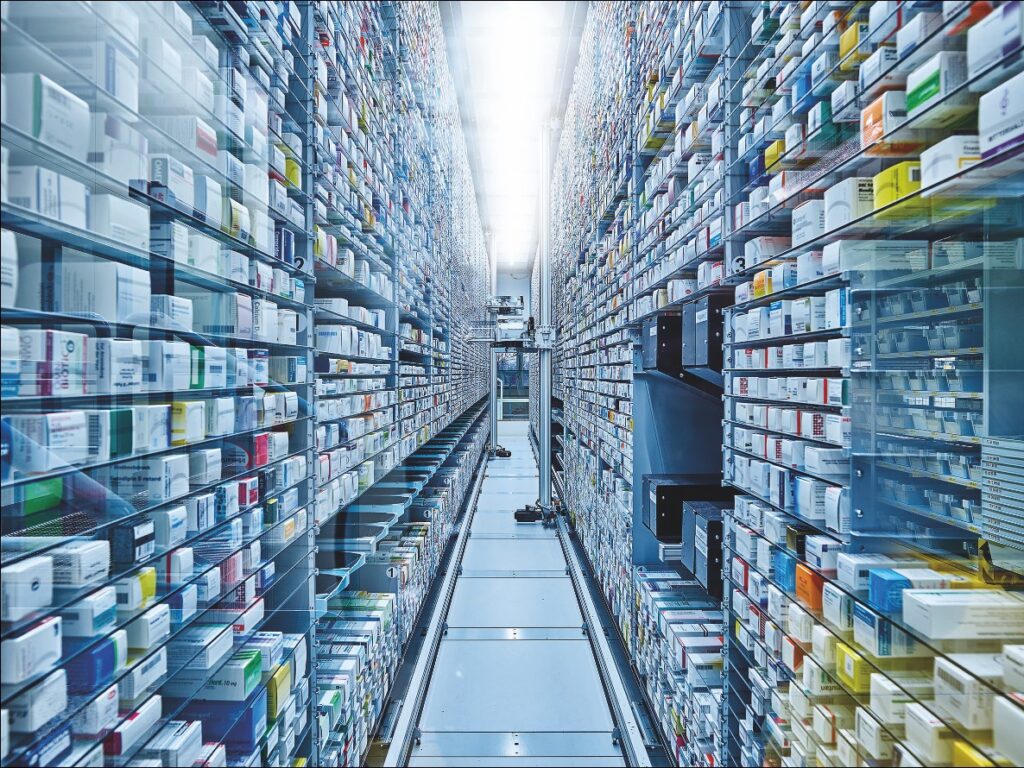
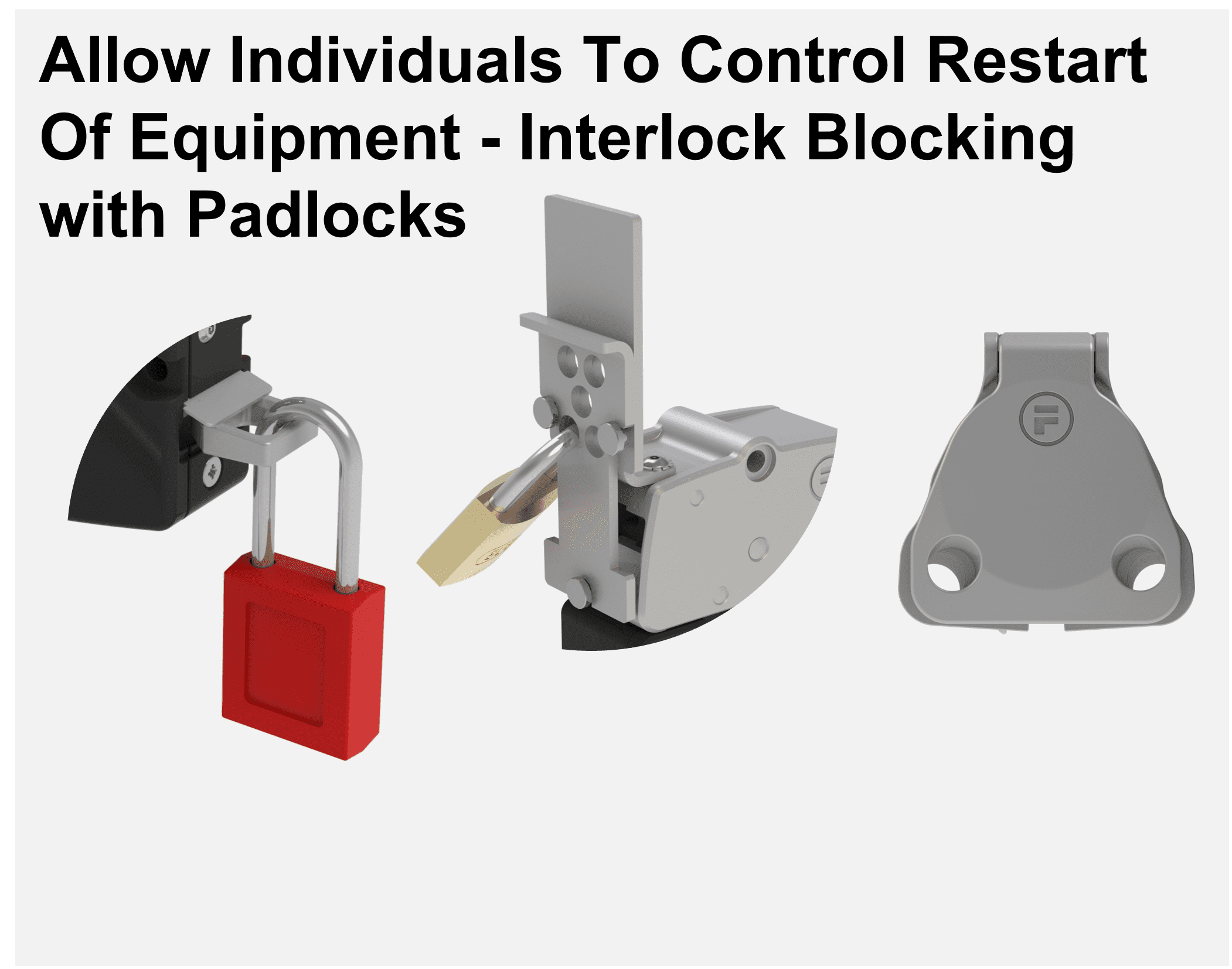
固定的周边防护有可能减少生产占地面积,它还有一个好处是可以防止零件或材料从受保护的空间 ,当使用带有防护锁定 的联锁时,操作员不能进入机器 ,直到它处于安全状态。
存在感安全装置将与固定防护携手并进,它有自己的位置,但现实情况是,固定防护在现代制造环境中会继续存在,也会帮助机器 设计者减少其制造足迹。
本文中提到的产品
mGard
tGard
 点击这里下载文章
点击这里下载文章






案例研究
什么是危险能源的控制?
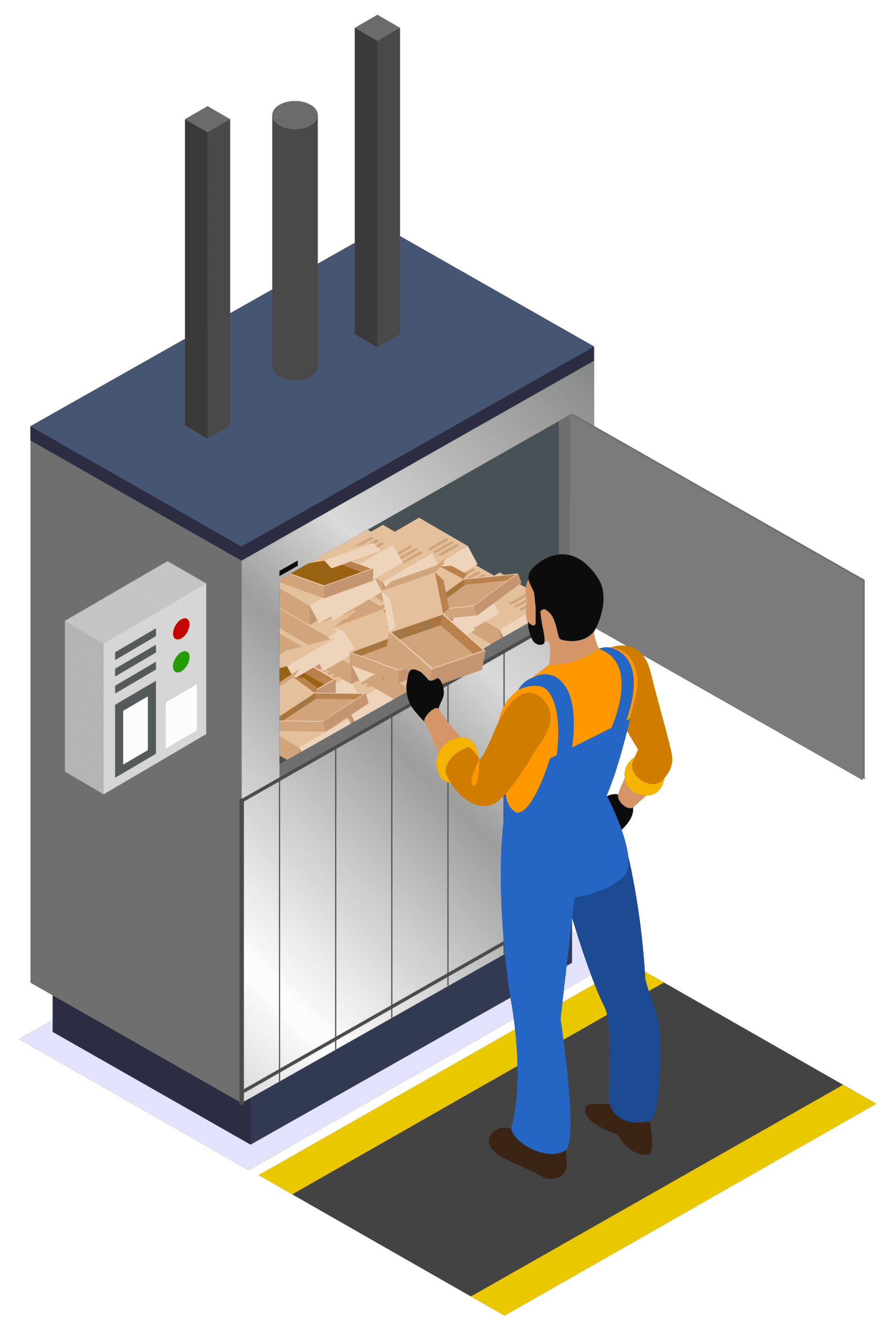
了解危险能量的控制,这是一种安全程序,用于防止因机器或设备意外释放能量而造成的事故和伤害。了解为什么控制危险能量很重要,以及如何通过使用锁定标记(LOTO)程序来实施。从Fortress Safety获得关于控制危险能源和机械安全的帮助。




案例研究
什么是危险能源的控制?
了解危险能量的控制,这是一种安全程序,用于防止因机器或设备意外释放能量而造成的事故和伤害。了解为什么控制危险能量很重要,以及如何通过使用锁定标记(LOTO)程序来实施。从Fortress Safety获得关于控制危险能源和机械安全的帮助。