
How to prevent unexpected start-up in whole body application with Robot System
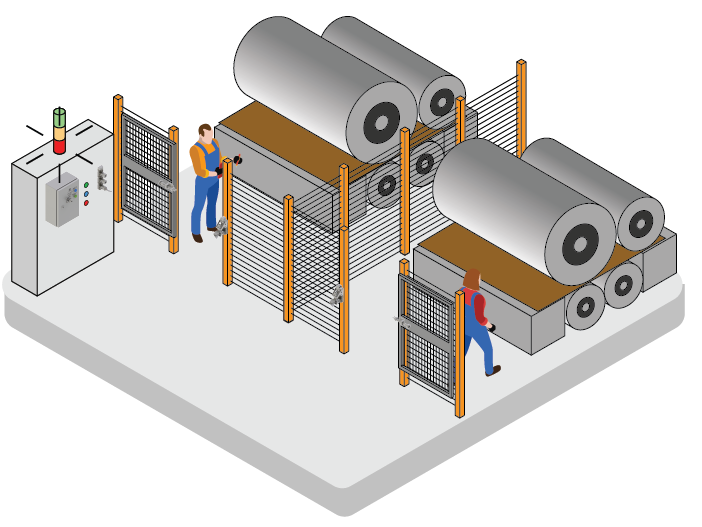
Whole body access is any situation where an individual can be completely inside the perimeter of the safeguarded space. Robot systems often have large safeguarded systems associated with them and therefore whole-body access is something that must be considered.
The ISO standard for Safety Requirements for Industrial Robots (ISO 10218:2011) has been adopted across a wide number of regions, including the US (RIA 15.06 – 2012), Canada (CSA Z434 – 2014), Australia (AS 4024.3301/2:2017) and India (IS 14530:2019) making it quite possibly the most well harmonised machinery safety standards.
This is great news for anyone who is involved in the design, manufacture or use of robots, especially across multiple countries and regions as the requirements will be identical between them. ISO 10218-2:2011 gives very clear guidance on how to prevent the unexpected start-up of a robot system while an operator is within the safeguarded space.
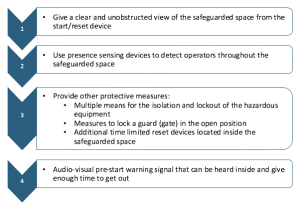
Guidance on how to prevent the unexpected start-up of a robot system
Guidance on how to prevent the unexpected start-up of a robot system
Only if there are no other means possible to prevent unexpected start-up then an audio-visual pre-start warning can be used along with enough easily identifiable and accessible emergency stop devices in case someone was to be alerted by the signal while inside the safeguarded space.
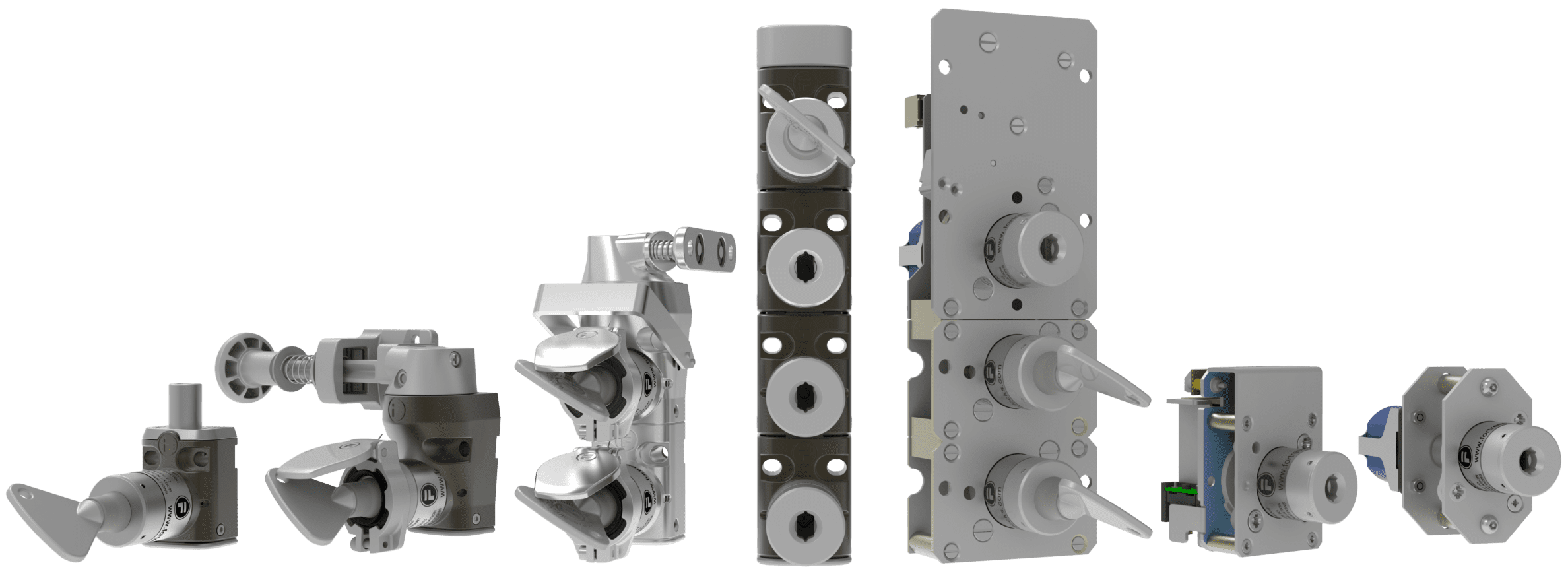
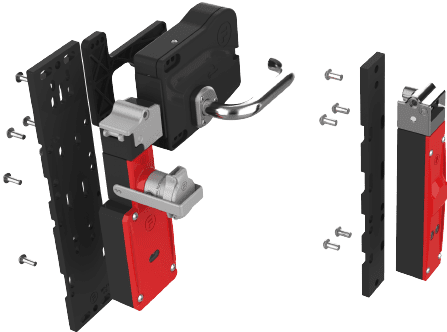
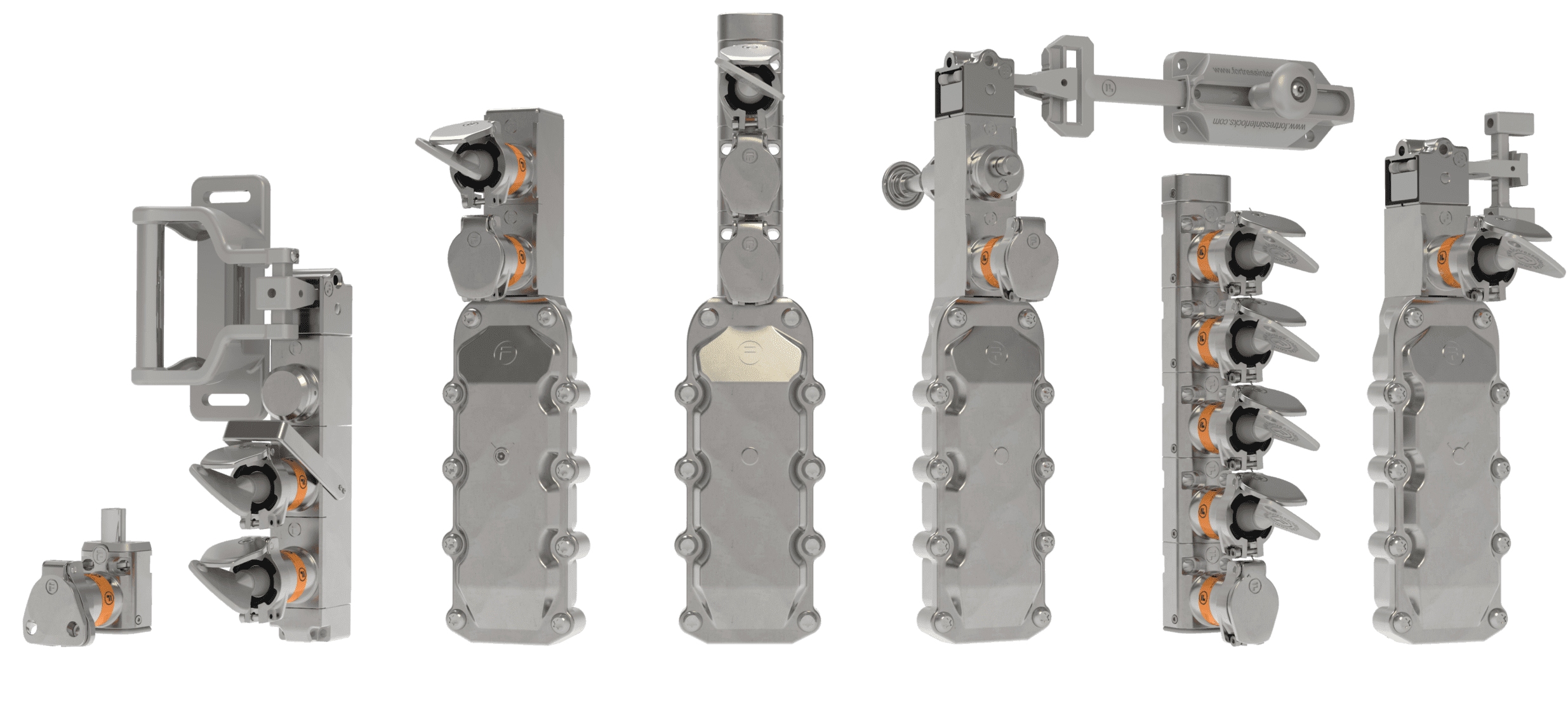
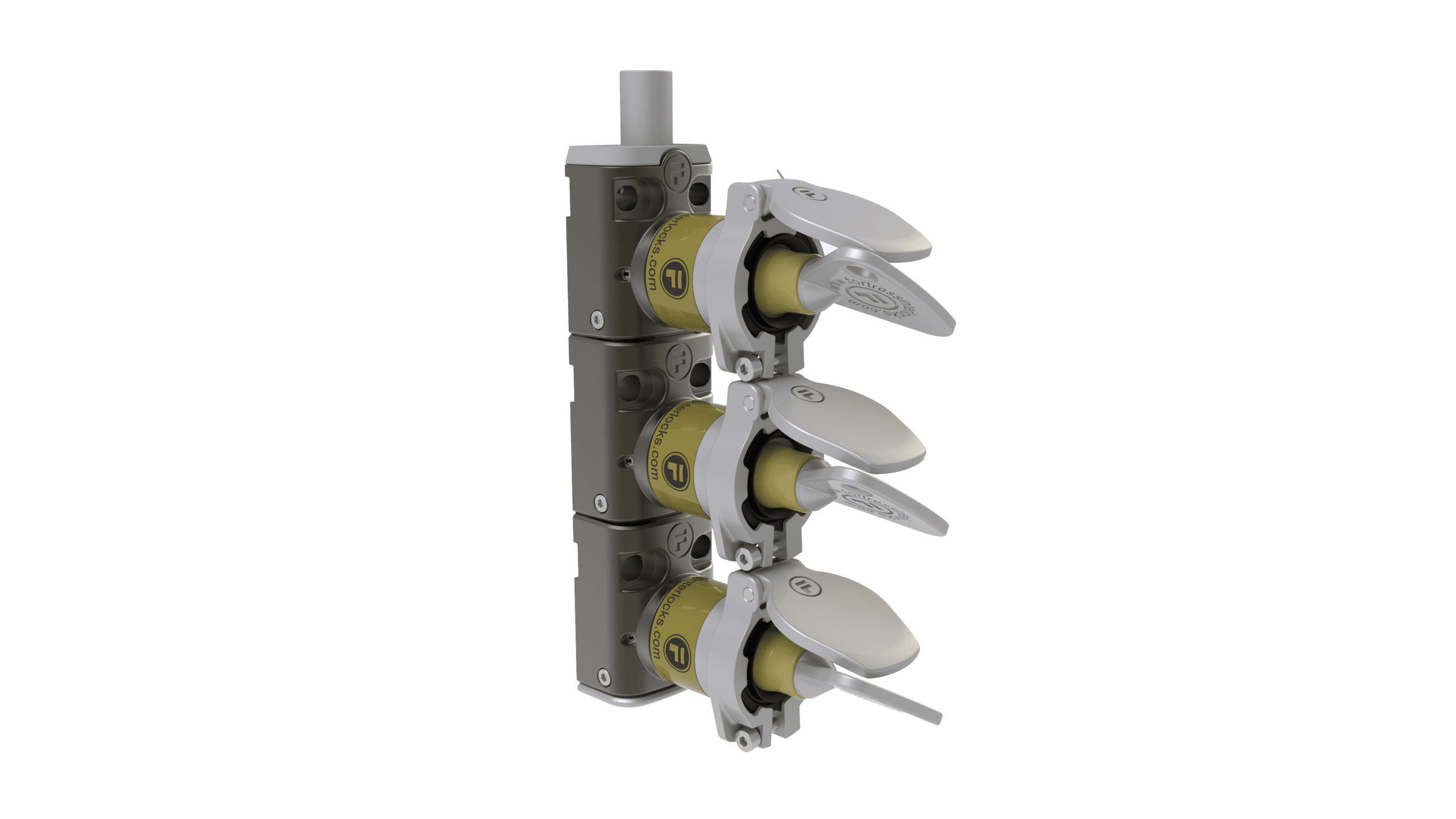
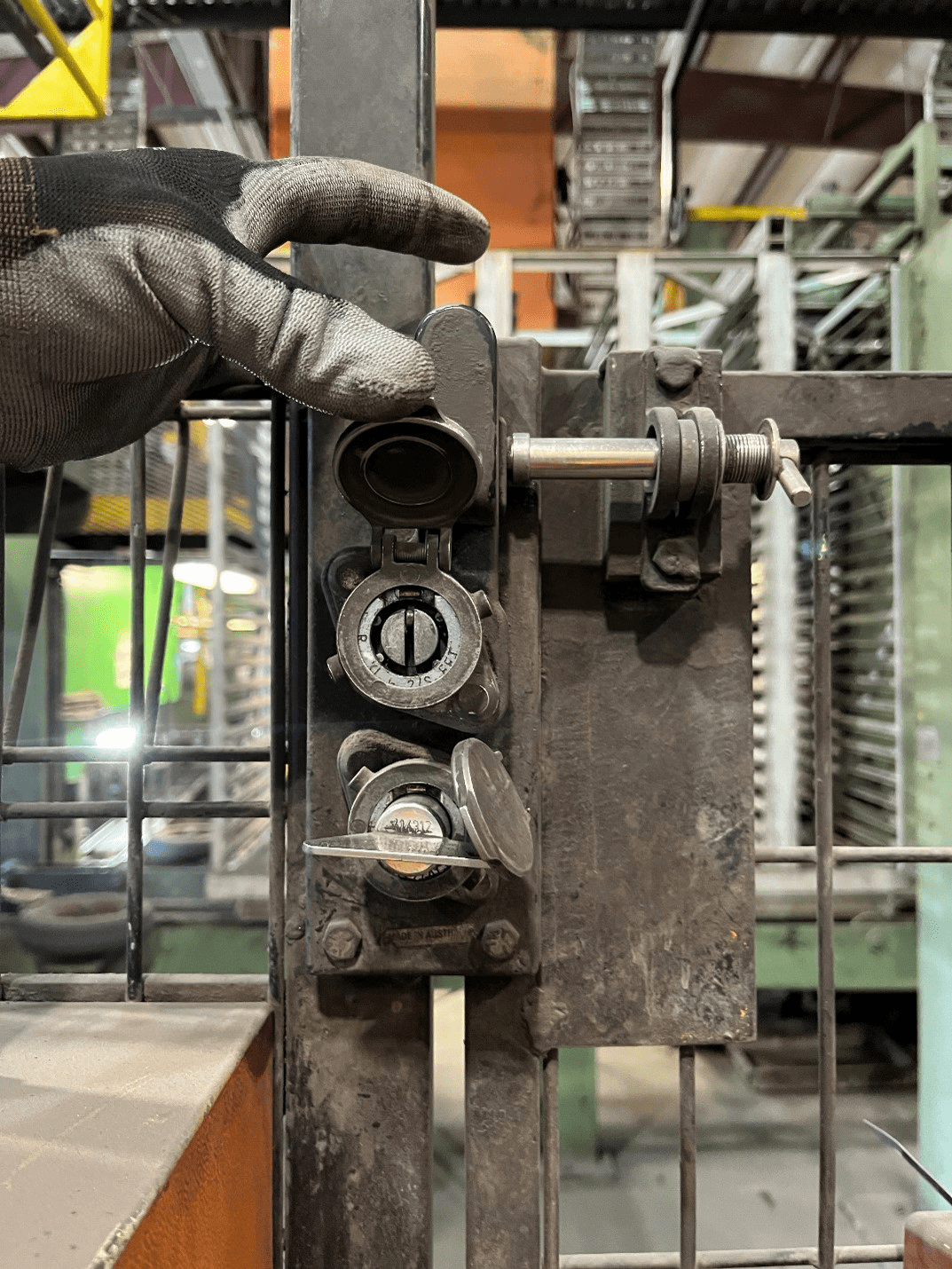
Fortress interlocks has a wide range of products to help you reduce the risk of unexpected start-up in a robot system including a range of fully mechanical or electromechanical gate interlocks which can be fitted with safety keys, including forced extraction safety keys. We also have a mechanical, retrofittable interlock blocking device which can be added to existing systems without changing the existing interlocks or wiring.
Products Mentioned in this Article

amGardpro
mGard
 Click Here to Download Article
Click Here to Download Article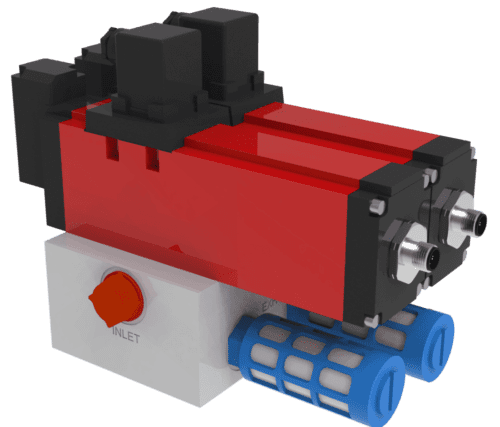

Case studies

Design to Minimize Motivation to Defeat Possibilities of Interlocking Devices
Case studies
Enhancing Lockout / Tagout Procedures – How Do I Perform Full Power Isolation?
Case studies

Example of a Trapped Key Interlock System in the Control of Multiple Energy Sources
Case studies
